Разделы сайта
- Главная
- Электроника: интересно и познавательно
- Организация производства радиоэлектронной техники
- Телефонные переговоры по технологии IP-телефонии
- Информационно-компьютерная система службы видеонаблюдения
- Физические основы электроники
- Автоматические системы управления
- Цифровые устройства и приемники
Расчёт автокорреляционной функции кодового сигнала
Функция автокорреляции показывает статистическую связь между временными сечениями сигнала.
В общем случае функция автокорреляции (АКФ) четная по параметру t и определяется так:
 , (4.1)
, (4.1)
где T - длительность сигнала;
![]() - дисперсия сигнала;
- дисперсия сигнала;
t - временное расстояние между двумя сечениями сигнала.
В нашем случае вычисление функции автокорреляции выполним в среде MathCad, для этого возьмем первые четыре выборки кодовой последовательности, значения которых соответственно равны: 37, 11, 4, 1; преобразуем их в двоичный код и склеим. В среде MathCad создадим два вектора Vx и Vy в виде матрицы с 24 строками и одним столбцом и заполним их найденным кодом сигнала.
, 11, 4, 1 - это номера уровней.
Они были получены путём деления значения вершин отсчётов дискретизованной последовательности на время дискретизации τ
. Затем эти числа мы перевели в двоичный код и записали в столбцы матриц Vx и Vy.
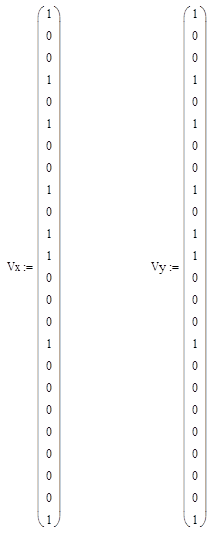
Затем, используя функцию corr (Vx, Vy) находим корреляцию (при равных векторах, она будет равна 1), после этого, сдвигая вектор Vy на одну строку, получаем новое значение корреляции. Так повторяем 7 раз и получаем табличную функцию автокорреляции (таблица 4.1) и ее график (рисунок 4.2).
Таблица 4.1 - Зависимость K (t)
|
t·10-6, с |
K (t) |
|
0 |
1 |
|
6.541 |
-0.125 |
|
13.08 |
-0.125 |
|
19.62 |
0.063 |
|
26.16 |
-0.125 |
|
32.7 |
0.25 |
|
39.25 |
-0.125 |
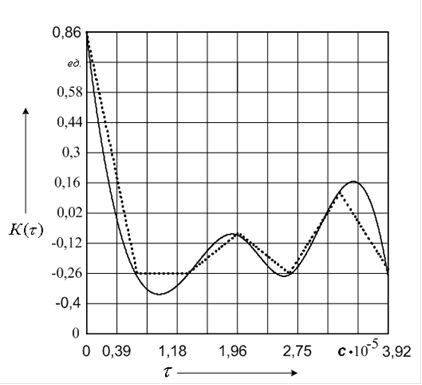
Рисунок 4.2 - График автокорреляционной функции
Интересное из раздела
Установка акустической системы в автомобиль Honda Civic
Еще недавно желание иметь в
автомобиле аудиосистему класса НІ-FІ расценивалось большинством окружающих в
лучшем случае как бездумная трата денег. Однако для ...
Расчет модели сети передачи данных
Вариант № 1
Начальная интенсивность внешнего источника λ0 = 1 заявок/с
Таблица 1.
Тип модели
Способы
представления ...
Цифровой показатель уровня топлива
Топливомер - прибор, измеряющий объемное или весовое количество топлива или масла в баках. Как правило, непосредственное измерение количества топлива крайне затруднено, п ...