Разделы сайта
- Главная
- Электроника: интересно и познавательно
- Организация производства радиоэлектронной техники
- Телефонные переговоры по технологии IP-телефонии
- Информационно-компьютерная система службы видеонаблюдения
- Физические основы электроники
- Автоматические системы управления
- Цифровые устройства и приемники
Входное сопротивление ЧП в режиме КЗ при обратном направлении передачи энергии
![]() , (2.4)
, (2.4)
Резонанс напряжений:
![]() .
.
Резонанс токов:
![]() ,
,
![]() .
.
По результатам расчета (см. табл. 2.4) построим график частотной зависимости Z2кз (w), рис. 2.6.
Таблица 2.4. Частотная зависимость сопротивления Z2кз (w)
|
Угловая частота w, c-1 |
|
|
0 |
0 |
|
2.5e3 |
0+93.868i |
|
5e3 |
0+245.959i |
|
7.5e3 |
0+1.034e3i |
|
*1e4 |
0-465.116i |
|
1.25e4 |
0-96.072i |
|
1.5e4 |
0+40.928i |
|
1.75e4 |
0+154.371i |
|
2e4 |
0+291.333i |
|
2.25e4 |
0+509.856i |
|
2.5e4 |
0+1.002e3i |
|
2.75e4 |
0+3.729e3i |
|
3e4 |
0-3.013e3i |
|
3.25e4 |
0-1.175e3i |
|
3.5e4 |
0-759.460i |
|
3.75e4 |
0-573.530i |
|
4e4 |
0-466.861i |
Схема и параметры ЧП в режиме КЗ при обратной передаче энергии.
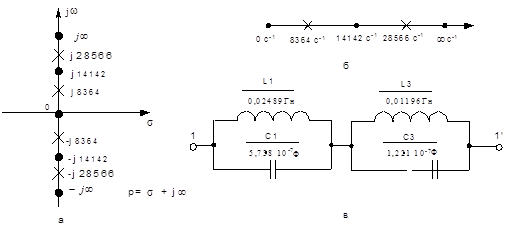
Рис. 2.5
Интересное из раздела
Утечка речевой информации по волоконно-оптическим линиям
На смену медным проводам постепенно приходят волоконно-оптические линии
связи. Они обеспечивают большую пропускную способность, они долговечнее.
Однако, ...
Проблемы обнаружения и подавления работы радиоуправляемых взрывных устройств
Цель
контрольной работы - описать проблемы обнаружения и подавления работы
радиоуправляемых взрывных устройств и сотовых телефонов, выявить основные
методы ...
Программируемый формирователь последовательности импульсов с цифровой индикацией количества импульсов
Проектируемое устройство в готовом виде представляет собой отдельный прибор, основной функцией которого является формирование последовательности импульсов заданной частот ...