Разделы сайта
- Главная
- Электроника: интересно и познавательно
- Организация производства радиоэлектронной техники
- Телефонные переговоры по технологии IP-телефонии
- Информационно-компьютерная система службы видеонаблюдения
- Физические основы электроники
- Автоматические системы управления
- Цифровые устройства и приемники
Дистанционная передача измерительной информации
Для дистанционной передачи измерительной информации широко применяют электрические системы с электромеханическими преобразователями, входная электрическая величина которых определяется положением их подвижных частей. Такие преобразователи, наряду с простотой их устройства и высокой надёжностью, позволяют преобразовать многие технологические параметры в электрический сигнал. К таким параметрам относятся: линейное и угловое перемещения, скорость и ускорение перемещаемых изделий, давление, разрежение, расход, уровень жидкости и т.д.
Большое распространение в системах дистанционного контроля получил дифференциально-трансформаторный преобразователь (ДТП), который представляет собой два совмещённых трансформатора с общим подвижным якорем (рис. 1) [1, 2, 3].
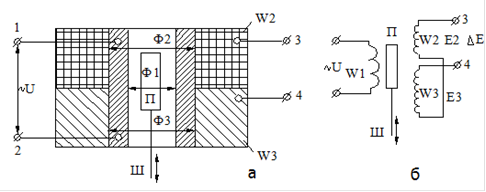
Рис. 1. Общий вид цилиндрического ДТП (а); схема соединения его обмоток (б)
дифференциальный трансформаторный преобразователь дистанционный
Принцип действия ДТП основан на изменении взаимоиндуктивности двух систем обмоток при перемещении элемента магнитопровода.
На пластмассовой катушке размещены одна первичная W1 и две вторичные W2, W3 обмотки. Катушка заключена в цилиндрический стальной кожух-магнитопровод для защиты от внешних магнитных полей. Первичная обмотка размещена равномерно по всей длине катушки. К её концам 1 и 2 подводится напряжение питания переменного тока. Вторичные обмотки выполнены в виде секций, каждая из которых занимает половину катушки по длине, имеют одинаковое число витков и включены встречно.
Внутри катушки находится плунжер 2 измагнито-мягкого железа, который по длине меньше катушки. Через шток - Ш плунжер связан с чувствительным элементом, перемещение которого зависит от измеряемого параметра.
При питании обмотки W1 переменным напряжением U создаётся магнитный поток Ф1, охватывающий обе вторичные обмотки, и потоки Ф2 и Ф3, связанные с обмотками W2 и W3 соответственно.
Во вторичных обмотках индуцируется ЭДС.
E2 = 4,44f ∙W2(Ф1 + Ф2) иE3 = 4,44f ∙W3(Ф1 + Ф3)
где f - частота питающей сети; W2,W3 - число витков соответствующих обмоток.
Если плунжер 2 находится в среднем положении, то ЭДС Е2= Е3 и при последовательном и встречном соединениях вторичных обмоток на зажимах 3 и 4 напряжение будет равно нулю, т. е. ∆Е = Е2-Е3 = 0.
Если плунжер сместится из среднего положения, равенство Ф2 = = Ф3 нарушится, и на зажимах 3 и 4 появится результирующая ЭДС. Величина этой ЭДС будет зависеть от величины смещения плунжера, а фаза - от направления его смещения.
Интересное из раздела
Цифровой КИХ-фильтр для частотной селекции измерительных сигналов
Цифровой фильтр (ЦФ) - устройство, пропускающее, либо подавляющее заданные в цифровой форме сигналы в определенной полосе частот. В отличие от аналоговых фильтров, у кото ...
Расчет усилителя постоянного тока
электромагнитная головка
тип - ГЗМ-105
Диапазон частот - 31,5 - 18 кГц
Величина выходного напряжения (на НЧ) - 0,7 мВ
Величина выходног ...
Проектирование генераторного триода дециметрового диапазона
Генераторные
лампы предназначены для генерирования и усиления электрических колебаний низких
и высоких частот. По роду работы генераторные лампы можно разде ...