Разделы сайта
- Главная
- Электроника: интересно и познавательно
- Организация производства радиоэлектронной техники
- Телефонные переговоры по технологии IP-телефонии
- Информационно-компьютерная система службы видеонаблюдения
- Физические основы электроники
- Автоматические системы управления
- Цифровые устройства и приемники
Уточнение настроечных параметров регулятора и получение переходных характеристик по каналам «Хз-Х» и «Z-X»
Для замкнутой линейной системы управления (рис. 1.) с отрицательной обратной связью выбрать настроечные параметры регулятора, обеспечивающие требуемое качество переходного процесса по указанному каналу воздействия. Структурная схема системы управления представлена на рисунке.
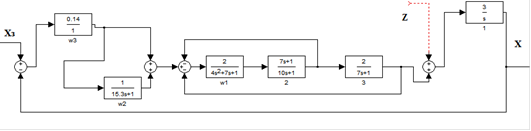
Рисунок 12 - Алгоритмическая схема системы регулирования
В схеме реализован регулятор, работающий по ПИ-закону регулирования.
![]()
Реализация данной схемы управления на Control System Tool Box выглядит следующим образом:
% создаем описание звеньев всей системы;
sys1=tf([0.14], [1]); %описание W1
sys2=tf([1], [15.3 1]); %описание W2
sys3=tf([2], [4 7 1]); %описание W3
sys4=tf([7 1], [10 1]); %описание W4
sys5=tf([2], [7 1]); %описание W5
sys6=tf([3], [1 0]); %описание W6
sys=append (sys1, sys2, sys3, sys4, sys5, sys6); %объединяем звенья=[1 -6 0 0 0; %задаем соединения звеньев
1 0 0 0;
1 2 -4 -5;
3 0 0 0;
4 0 0 0;
5 0 0 0];
inputs=[1,6]; %Задаем входы системы по каналам «Хз-Х» и «Z-X»
outputs=[6];%задаем выходы системы по каналам регулирования
system=connect (sys, Q, inputs, outputs); %объединяем систему с помощью Connect;(system, [0:.1:100])%построение передаточной функции системы; %построение сетки на графике
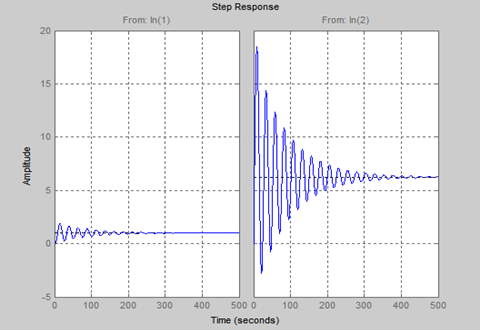
Рисунок 13 - Переходная характеристика замкнутой системы по основному каналу с расчетными значениями настроечных параметров регулятора
Процесс с 20% перерегулированием, допускает перерегулирование до 20%.
Поиск оптимальных значений я начал с расчетных значений. И путем подбора мне удалось найти оптимальные значения параметров, при которых обеспечивается переходный процесс с перерегулированием 20%.
Kp=0.047 и Ти=30. Подставляя данные значение вместо прежних, мы получим следующие переходные характеристики:
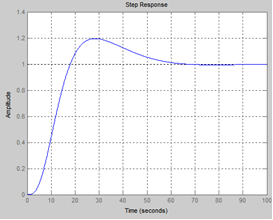
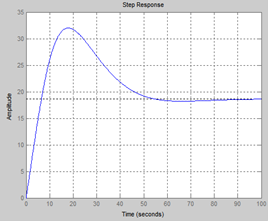
Рисунок 14 - Переходные характеристики замкнутой системы по каналам «Хз-Х» (слева) и «Z-X» (справа) с оптимальными значениями настроечных параметров регулятора.
Оценка показателей качества:
![]() ;
;
tп=90с; - по графику;
Проверка результатов в Simulink
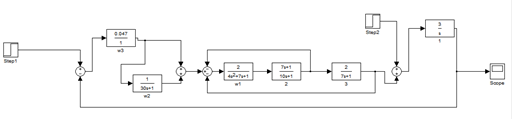
Рисунок 15 - Расчетная схема цифровой модели системы управления для системы Simulink
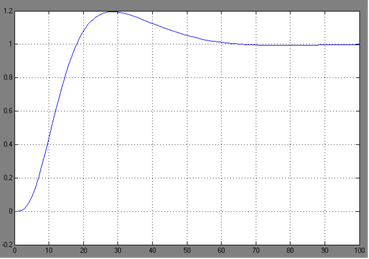
Рисунок 16 - Переходные характеристики замкнутой системы по каналам «Хз-Х с оптимальными значениями настроечных параметров регулятора.
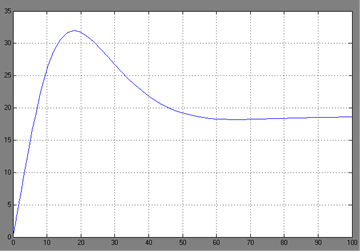
Рисунок 17 - Переходные характеристики замкнутой системы по каналам «Хз - «Z-Xс оптимальными значениями настроечных параметров регулятора.
Я нашел оптимальные настроечные параметры регулятора, которые обеспечивают требуемое качество переходного процесса по обоим каналам управления и проверила в Simulink результаты идентичные. Перерегулирование имеет приемлемую для нас величину и составляет 20%.
Заключение
Целью данной работы являлось закрепление знаний полученных при изучении дисциплины «Моделирование систем управления», «Теория автоматического управления». Я считаю, что знания были закреплены. В 1-ом разделе данной работы я преобразовывал исходную алгоритмическую схему объекта с целью выделения внутреннего и внешнего контура, определял их устойчивость с помощью критерия устойчивости Найквиста. Также определял запасы устойчивости. Во 2-ом разделе я составил цифровую модель объекта с помощью программных продуктов Control System Toolbox и Simulink. В 3-ем разделе необходимо было переходной характеристике объекта придать бесколебательный характер путем изменения параметров входящих в него звеньев. Нам это удалось сделать с помощью изменения параметра 1-го и 2-го звеньев. Результатом выполнения 4-ого раздела являлась аналитическая проверка результатов моделирования. После её выполнения результаты проверки и моделирования совпали, что говорит об адекватности модели объекту. В 5-ом разделе я выполнил аппроксимацию переходной характеристики объекта, полученной в 3-ем разделе. Графо-аналитическим способом определил параметры аппроксимирующего объекта. По этим данным вычислил настроечные параметры регулятора. В 6-ом разделе соединил регулятор и объект в одну систему и получил график переходного процесса по основному каналу. Подобрал оптимальные значения настроечных параметров регулятора, которые обеспечивают требуемое качество переходного процесса.
Интересное из раздела
Анализ алгоритмов цифровой обработки сигналов. Исследование корректирующих способностей циклических кодов
цифровой сигнал циклический код
Цифровой фильтр - в электронике любой фильтр, обрабатывающий цифровой сигнал с целью выделения и/или подавления определённых частот этого ...
Двухканальный усилитель низкой частоты 2х22Вт
Предлагаемый усилитель обладает малыми габаритами и широким диапазоном
питающих напряжений. УНЧ воспроизводит частоты 45 Гц…20 кГц при коэффициенте
нелинейн ...
Проектирование автоматического измерителя артериального давления
Важным компонентом клинического мониторинга, определяющим
состояние сердечнососудистой системы и организма в целом, является контроль
кровяного давления. Дв ...