Разделы сайта
- Главная
- Электроника: интересно и познавательно
- Организация производства радиоэлектронной техники
- Телефонные переговоры по технологии IP-телефонии
- Информационно-компьютерная система службы видеонаблюдения
- Физические основы электроники
- Автоматические системы управления
- Цифровые устройства и приемники
Расчет потенциометрического датчика
Потенциометрическим датчиком (ПД) называется элемент автоматики, осуществляющий преобразование механического превращения (углового или линейного) в электрический сигнал за счет изменения величины активного сопротивления, к которому подключена нагрузка.
Основные элементы потенциометрического датчика:
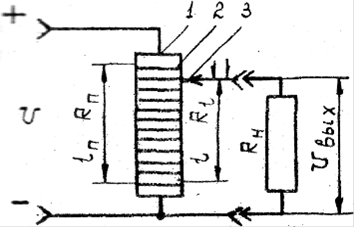
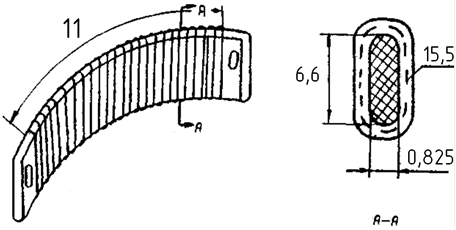
Рис. 1. Потенциометрический датчик
1. Каркас
2. Обмотка
. Подвижный контакт (движок) и корпус
Каркас изготовителя из изоляционного материала(эбонита, текстолита, керамики и т.д.) или из металлов(например, алюминия) для отвода тепла.
Обмотка изготавливается из изолированной проволоки, имеющей большое удельное электрическое сопротивление и малый температурный коэффициент сопротивления. Обычно для изготовления обмоток ПД применяют сплавы: никеля с медью(константан), хрома, никеля и железа (нихром), меди, марганца и никеля(манганин), а также сплавы благородных металлов, которые отличаются высокой стойкостью по отношению к коррозии.
Обмотку необходимо хорошо укреплять на каркасе, чтобы при движении контакта движка не происходило смещения. Для этого обмотку наматывают на каркас, покрытый не засохшим термореактивным лаком. После намотки каркас помещают в печь, лак затвердевает и прекрасно крепит обмотку.
Для создания надежного контакта обмотки с контактом движка (подвижным контактом) контактную дорожку тщательно очищают специальными абразивными материалами, химическими или ультразвуковыми способами и т. п. Иногда контактная дорожка полируется и даже гальванически покрывается золотом.
Движок ПД состоит из упругого элемента и контакта. Упругий элемент (пружина) обеспечивает необходимое контактное давление и компенсирует небольшие неровности на поверхности обмотки.
Контакт припаивается к пружине мягким или твердым припоем. Рекомендуется выбирать контакт из материала более мягкого, чем обмотка (золото, серебро, сплавы платины и др.). Для большей эксплуатационной надежности иногда используются два токосъемных контакта.
Корпус потенциометра чаще всего имеют форму цилиндра, закрытого одной или двумя крышками, и выполняется из металла или изоляционного материала. В металлических корпусах выполняются потенциометры, предназначенные для эксплуатации при повышенных температурах и в сложных условиях, и потенциометры, к которым предъявляются высокие требования в отношении точности. Компромиссным решением является корпус из пластмассы с металлическими крышками.
Ось потенциометра крепится в шариковых подшипниках или подшипниках скольжения, размещенных в крышке или в корпусе потенциометра.
В зависимости от конструкции ПД, их можно подразделить на:
- кольцевые;
- пластинчатые;
стержневые;
многооборотные.
В зависимости от конструктивного исполнения ПД делятся на однотактные и двухтактные.
Все ПД можно питать как постоянным, так и переменным током.
У двухтактных ПД, питание которых осуществляется переменным током, при изменении положения движка относительно нейтрали фаза выходного напряжения меняется на 180о относительно фазы напряжения питания. Двухтактные ПД могут выполнятся на одном и двух потенциометрах (мостовая схема).
Достоинства ПД являются:
1. Возможность получения линейной характеристики в широком диапазоне углов.
2. Способность работы на постоянном и переменном токе.
. Значительная снимаемая мощность.
. Малый вес и габариты.
. Малая подверженность помехам со стороны электромагнитных полей.
Недостатками ПД являются:
1. Наличие механического контакта, резко снижающего надежность и срок службы датчиков, а также обусловливающего момент сухого трения.
2. Ступенчатость характеристики и принципиальная ограниченность чувствительности.
. Необходимость токоподводов.
. Сложность изготовления.
В настоящее время разработано и применено большое количество схем и конструкций ПД, применяемых в различных приборах и устройствах. В технической литературе приводятся различные методы расчёта, особенности которых определяются как различиями в конструктивном исполнении ПД, так и спецификой их работы в конкретных условиях автоматики,
телемеханики и счетно-решающей технике. При этом должны учитываться условия работы, тактико-технические и эксплуатационные требования, предъявляемые к потенциометрам - основным элементам этих датчиков.
Исходные данные для расчёта (см. таблицу 1):
Таблица 1
|
№ вар. |
хвх max |
Кд |
Dвх min |
dlmax, % |
Dt,° C |
R0, мм |
Материал каркаса |
|||
|
a, град |
L, мм |
В/град |
В/мм |
Угл. мин |
мм |
|||||
|
1 |
8 |
1 |
4 |
1 |
-50…+50 |
30 |
Керам. |
|||
где
. Максимальный угол входной величины хвх max = a =8град.
. Коэффициент передачи датчика Кд=1 В/град.
3. Порог чувствительности Dвх min=amin=4мин.
4. Максимальная относительная погрешность dlmax,=1%.
5. Диапазон изменения температуры окружающей среды ![]() t
=-50°... +50°
t
=-50°... +50°
. Материал каркаса: керамика.
Задачи курсовой работы:
Рассчитать по методике расчета двухтактного потенциометрического датчика угловых перемещений, выполненном на линейном потенциометре, потенциометрический датчик, согласовать параметры полученного ПД с АЦП, рассчитать надежность, наработку на отказ и начертить схему.
Основными этапами расчета по данной методике являются:
. Определение основных конструктивных параметров каркаса и обмотки.
. Расчет электрических параметров обмотки.
. Расчет температурного режима датчика.
. Выбрать АЦП, по полученным параметрам ПД.
. Расчет характеристик надёжности работы схемы.
. Начертить схему.
. Расчет потенциометрического датчика
потенциометрический датчик каркая обмотка
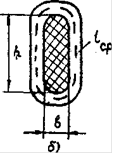
Основные параметры ПД условно можно разделить на конструктивные и схемные, или электрические параметры (рис.1, а, б).
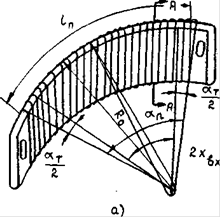
К конструктивным параметрам относятся:- средний расчетный диаметр каркаса;
aп - угол намотки потенциометра;- высота каркаса;
в - ширина или толщина каркаса;
am- суммарная технологическая добавка;
ln - рабочая длина каркаса;
t - шаг намотки;
n - число витков обмотки;
d- диаметр провода обмотки без изоляции;
dиз - диаметр провода о изоляцией.
К схемным, или электрическим параметрам относятся:
U - напряжение питания датчика;- общее сопротивление обмотки потенциометра;
r - удельное сопротивление материала провода;
dlmax - максимальная относительная погрешность нагруженного датчика.
Последовательность расчёта
. Вычисляем общую величину угла намотки потенциометра.
![]() град
град
где ![]() - технологическая
добавка к рабочей протяженности каркаса
- технологическая
добавка к рабочей протяженности каркаса
(![]() =3…5 мм).
=3…5 мм).
. Вычисляем длину намотки потенциометра
 мм.
мм.
. Определяем число витков датчика
. Вычисляем шаг намотки
![]()
. Определяем диаметр провода в изоляции и без нее:
![]() ,
,
![]() .
.
. Выбираем высоту h , толщину в и материал каркаса
![]() ,
,
 .
.
. Определяем среднюю длину lср одного витка обмотки
![]()
. Вычисляем длину провода обмотки lобм
![]()
. Определяем минимально допустимое напряжение питания
 следовательно
следовательно ![]() .
.
. Вычисляем допустимую величину тока In, протекающего по обмотке датчика
![]() ,
,
где j - допустимая плотность тока, j=15…20 А/мм2 для ПД с керамическим каркасом;
Sпр - площадь поперечного сечения провода обмотки.
. Определяем необходимое сопротивление обмотки ПД
 .
.
. Вычисляем необходимое удельное сопротивление обмотки
 ,
,
где  .
.
. Выбираем материал провода для обмотки.
Близким удельным сопротивлением к полученному обладает материал никелин с r=0,43…0,52 Ом·мм2/м (этот материал обладает малой зависимостью удельного сопротивления от температуры).
Итак, мы выбираем константановый провод марки ПЭК с удельным электрическим сопротивлением r=0,44 Ом·мм2/м. Диаметр провода уточняем по сортаменту:
с изоляцией ![]() ;
;
без изоляции ![]() .
.
. Определяем действительные значения Rn и j

15. Вычисляем абсолютное значение DU
![]() .
.
. Определяем потребный нагрузочный коэффициент
![]() В,
В,
 , следовательно при
, следовательно при ![]() =0,5 имеем:
=0,5 имеем:

. Вычисляем минимально допустимую величину сопротивления нагрузи, которое может быть подсоединено к ПД, чтобы dl = 0,1 %
 ,
,
![]() .
.
. Определяем поверхность обмотки
![]()
. Вычисляем действительное значение перегрева обмотки в установившемся режиме.
При расчете температурного режима датчика обычно пользуются методикой, основанной на ориентировочном определении величины перегрева датчика в установившемся режиме. В основу этого расчёта положена следующая приближенная формула:
где m - коэффициент, учитывающий теплопроводимость каркаса и изоляции обмотки (равный 0,5-0,7 для пластмассовых, 1,5 для керамических и 2-3 для алюминиевых каркасов);
с - коэффициент теплоотдачи обмотки;
Sобм - поверхность обмотки, соприкасающаяся со средой;
Qу - установившийся перегрев обмотки (превышение температуры датчика над температурой окружающей среды).

Для керамического каркаса с =![]() Вт/град · см2
Вт/град · см2
Из условия хорошего контакта движка о обмоткой и отсутствия коробления каркаса допускается превышение температуры обмотки над температурой окружающей среды не более Qдоп = 40 … 50°,
где Qдоп = Qоб - Qср;
Qср температура окружающей среды;
Qоб - температура обмотки.
Так как при расчете получено, что Qуст < [Qдоп] никаких поправок в расчет вносить не требуется.
Следует иметь в виду, что температура контактирующих поверхностей не должна превышать 120-150°С. Это позволит исключить интенсивное окисление материалов обмотки и движка.
2. Выбор АЦП и согласование его с датчиком
В качестве АЦП выбираем К1113ПВ1 - АЦП последовательных
приближений, так как параметры данной микросхемы удовлетворяют полученному в
расчётах выходному напряжению нагрузки ![]() .
.
Параметры микросхемы К1113ПВ1 приведём в таблице 2:
Таблица 2
Тип Микросхемы N ![]() ,
,
% (МЗР)![]() ,
,
мкс![]() ,
,
В![]() ,
,
В![]() ,
,
|
В |
|
|||||||
|
К1113ПВ1 |
10 |
(1) |
30 |
5±5%; -15±5% |
±10 |
10,24 |
2,4/0,4 |
28 |

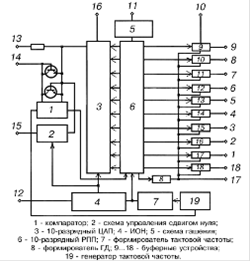
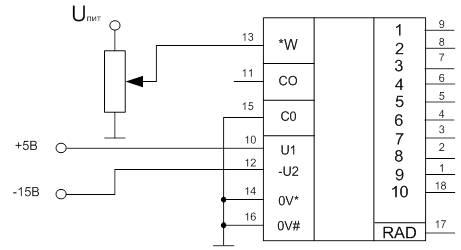
АЦП имеет внутренний источник опорного напряжения, тактовый генератор и компаратор напряжения. Для включения АЦП требуются источники питания и формирователь преобразования. Схема построения АЦП приведена на рис. 3.
а) б)
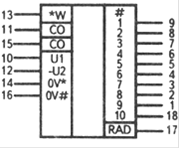
Рис. 3. Микросхема К1113ПВ1.
Где ЦАП - цифро-аналоговый преобразователь, ИОН - источник опорного напряжения, ГД - сигнал «Готовность данных», РПП - регистр последовательного приближения.
а-функциональная схема
б - условное графическое обозначение
Выводы микросхемы:
- девятый разряд;
- восьмой разряд;
- седьмой разряд;
- шестой разряд;
- пятый разряд;
- четвертый разряд;
- третий разряд;
- второй разряд;
- первый разряд;
- напряжение питания Uп1;
- гашение и преобразование;
- напряжение питания -Uп2;
- вход аналоговый;
- аналоговая "земля";
- управление сдвигом нуля;
- цифровая "земля";
- готовность данных;
- десятый разряд (младший);
Микросхема имеет выходные устройства с тремя устойчивыми состояниями, что упрощает его сопряжение с шиной данных микропроцессора. Несколько АЦП могут обслуживать один микропроцессор, и наоборот.
Режим работы микросхемы в микропроцессорной системе определяется управляющими импульсами от микропроцессора. При поступлении на вход «Гашение и преобразование» микросхемы К1113ПВ1 уровня лог. 0 АЦП начинает преобразование входной информации. Через время, необходимое для преобразования, на выходе АЦП «Готовность данных» появляется сигнал с уровнем лог. 1, запрашивающий вывод данных с АЦП на шину данных системы. Приняв данные в системную магистраль, МП устанавливает на входе «Гашение и преобразование» АЦП уровень лог. 1, который «гасит» информацию, содержащуюся в регистре последовательного приближения, и АЦП снова готов к приему и обработке входных данных.
Аналого-цифровой преобразователь может обрабатывать входную информацию в виде однополярного аналогового напряжения до 10,5В и двухполярного ±5,5В. При включении АЦП в двухполярном режиме вывод 15 (управление сдвигом нуля) должен быть открыт, а в однополярном режиме его необходимо соединить с выводом «цифровая земля».
Микросхема К1113ПВ1 допускает предварительную установку напряжения смещения нуля. В зависимости от точности регулирования и диапазона необходимой шкалы входного напряжения применяются различные варианты схем регулирования напряжения смещения. Так, при максимальном диапазоне входного сигнала UBX = 10,5 В регулировка напряжения смещения проводят переменным резистором 100…200Ом, подключенным между источником сигнала и аналоговым входом 13, а для достижения точности ±1/2 единицы МЗР - переменным резистором 5…50 Ом, подключенным с выхода 14 («аналоговая земля») на «корпус».
Таким образом, для согласования датчика и АЦП нам не потребуется делитель или усилитель напряжения преобразования сигнала, так как Uвх АЦП=10,24В, а выходное напряжение потенциометрического датчика Uвых.н=9,8В.
Таким образом, получаем следующую схему (см приложение).
Расчет надежности
Вероятность безотказной работы изделия при основном соединении N элементов записывается как
На практике наиболее часто интенсивность отказов изделий является величиной постоянной. При этом время возникновения отказов обычно подчинено экспоненциальному закону распределения. Тогда
Если имеется r типов элементов и i-й тип содержит Ni равнонадежных элементов, то
Для расчета надежности необходимо знать:
) вид соединения элементов расчета надежности;
) типы элементов, входящих в изделие, и число элементов каждого типа;
) величины интенсивности отказов элементов li, входящих в изделие.
Принимая во внимание режим работы элементов, требуется ввести поправочные коэффициенты:
ai учитывающий температуру и электрическую нагрузку,
- ki, учитывающий механические нагрузки и относительную влажность окружающего воздуха.
Итак, получим следующие характеристики надёжности схемы:
. Средняя интенсивность отказа:

. Вероятность безотказной работы, в течение 500 часов:

. Средняя наработка до первого отказа:
 часов.
часов.
Все параметры удовлетворяют требуемым значениям. Полученная вероятность безотказной работы схемы в течение 500 часов удовлетворяет требованию надёжности
![]()
следовательно, дополнительно предусматривать резервирование элементов нет необходимости.
Выводы по проведённой работе
В результате проведенной работы мы рассчитали параметры двухтактного потенциометрического датчика угловых перемещений, выполненного на линейном потенциометре с керамическим корпусом и спиралью из константана по заданной методике расчёта.
По полученным данным выбрали из справочника АЦП, параметры которого соответствовали с данными о необходимом напряжении нагрузки АЦП.
Провели расчёт надёжности для полученной схемы, в
соответствии с которым выяснили, что вероятность безотказной работы изделия в
течение 500 часов удовлетворяет требуемой надёжности ![]() , и поэтому резервирование
элементов производить не требуется.
, и поэтому резервирование
элементов производить не требуется.
Интересное из раздела
Анализ и синтез САУ методом корневого годографа
- Изучение системы автоматического регулирования (САР).
- Оценка качеств, характеристик САР
(устойчивости, ошибки, переходного процесса) по различн ...
Контроль параметров ошибок в трактах цифровых систем передачи
Основной
тенденцией развития телекоммуникаций во всем мире является цифровизация сетей
связи, предусматривающая построение сети на базе цифровых методов ...
Микроэлектроника. Новая быстро развивающаяся технология
Электроника
прошла несколько этапов развития, за время которых сменилось несколько
поколений элементной базы: дискретная электроника электровакуумных прибор ...