Разделы сайта
- Главная
- Электроника: интересно и познавательно
- Организация производства радиоэлектронной техники
- Телефонные переговоры по технологии IP-телефонии
- Информационно-компьютерная система службы видеонаблюдения
- Физические основы электроники
- Автоматические системы управления
- Цифровые устройства и приемники
Метрологические характеристики уровнемеров
Многообразие применяемых типов измерительных преобразователей, повышение требований к точности и надежности работы систем приводят к необходимости использования унифицированного сигнала как универсального средства связи для передачи информации. Отсутствие унифицированного сигнала на выходе преобразователей вызывает обычно значительное увеличение числа первичных приборов, что намного усложняет схемы автоматики. Поэтому для первичных преобразователей, выходной сигнал которых не унифицирован, используются нормирующие преобразователи.
Унифицирующие преобразователи могут быть конструктивно оформлены в единое целое с первичными преобразователями, составляя датчики, или в виде отдельных блоков.
Большое количество технологических величин легко преобразуются в силу, линейное или угловое перемещение. К ним относятся: давление, плотность, уровень, вязкость, температура, частота вращения и др. В системе ГСП для измерения этих величин построены датчики с механической компенсацией измеряемой величины. Датчики состоят из первичного измерительного преобразователя измеряемой величины в силу (или перемещение) и унифицированного измерительного преобразователя силы (или перемещения) для дальнейшего ее преобразования в стандартный пневматический или электрический сигнал.
Унифицированные силы или перемещения в стандартные сигналы ГСП могут быть построены по трем схемам (рис. 1).
Схема, известная под названием компенсации перемещения, имеет первичный
измерительный преобразователь (ПИП) с выходной величиной в виде перемещения
(рис. 1, а). В ПИП технологическая величина ![]() преобразуется в силу
преобразуется в силу ![]() , а затем в перемещение
, а затем в перемещение ![]() или угол поворота
или угол поворота ![]() . Преобразователь перемещения с обратной связью ИП
имеет унифицированный сигнал давления
. Преобразователь перемещения с обратной связью ИП
имеет унифицированный сигнал давления ![]() или
тока
или
тока ![]() .
.
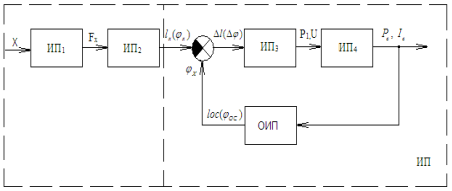
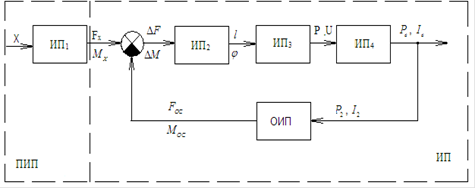
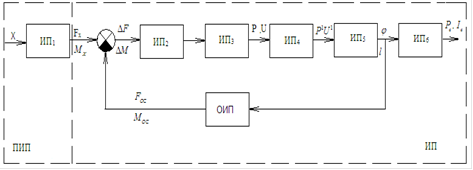
Рис. 1.
В статической схеме с силовой компенсацией (рис. 1, б) измеряемую
величину Х, преобразованную в силу ![]() (или
момент
(или
момент ![]() ) первичным преобразователем, компенсируемую усилием
) первичным преобразователем, компенсируемую усилием ![]() (
(![]() ),
развиваемым в ИП цепью обратной связи ОИП. Вследствие статизма системы полное
равенство
),
развиваемым в ИП цепью обратной связи ОИП. Вследствие статизма системы полное
равенство ![]() и
и ![]() недостижимо,
поскольку измеряемое усилие
недостижимо,
поскольку измеряемое усилие ![]() частично
тратится на преодоление сил трения и жесткости в системе.
частично
тратится на преодоление сил трения и жесткости в системе.
Астатическая схема (рис. 1, в) с полной силовой компенсацией содержит
интегрирующее звено ИП4 в прямой цепи преобразования ИП. При этом
уравновешивание усилием обратного измерительного преобразователя ОИП ![]() происходит до порога чувствительности индикатора
рассогласования ИП2.
происходит до порога чувствительности индикатора
рассогласования ИП2.
В первой структурной схеме ПИП не охвачен обратной связью и все его погрешности войдут в погрешность датчика. В схеме с силовой компенсацией перемещения чувствительных упругих элементов не оказывают заметного влияния на погрешность датчика в целом. В астатической структурной схеме используется ряд дополнительных преобразователей, что усложняет конструкцию датчиков.
В связи с этим все датчики ГСП имеют конструктивно встроенный уравновешивающий преобразователь силы в электрический или пневматический сигнал. Эти преобразователи выпускаются отдельными блоками и могут быть использованы для перехода от одних физических величин к другим.
Интересное из раздела
Проект системы видеонаблюдения для малых предприятий на базе OOO Лоцман-БТ
В наши дни системы видеонаблюдения выделились в самостоятельную область
средств охраны, имеющую собственные правила и особенности эксплуатации. Системы
виде ...
20-разрядный аналого-цифровой преобразователь, изготовленный по технологии КМОП 0,9 пм
Традиционные
конструкции аналого-цифровых преобразователей (АЦП) использовали параллельную
архитектуру и биполярные технологии для получения 8-битного разрешени ...
Методы локализации неисправностей на аппаратуре СВ и РМ
Информация о воздушной
обстановке в виде формуляра кодограммы Т-РМ поступает от СВ в УУО блока УОП
АРМ.
Из узла управления
обменом тип принятого донесен ...