Разделы сайта
- Главная
- Электроника: интересно и познавательно
- Организация производства радиоэлектронной техники
- Телефонные переговоры по технологии IP-телефонии
- Информационно-компьютерная система службы видеонаблюдения
- Физические основы электроники
- Автоматические системы управления
- Цифровые устройства и приемники
Оценка качества скорректированной САУ аналитическим методом
Подставим найденное корректирующее устройство в заданную систему, и смоделируем полученную схему в MATLAB. На рисунке 12 представлен переходной процесс системы.
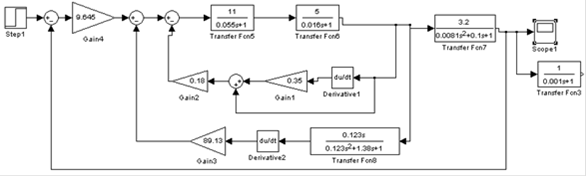
Рис.12 Структурная схема скорректированной САУ
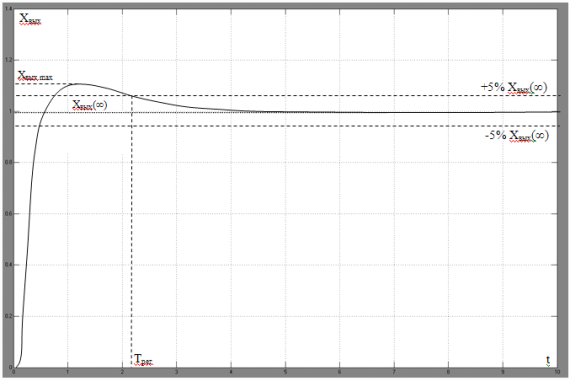
Рис. 13 Переходная характеристика скорректированной САУ
Из рисунка видно, что система устойчивая, количество колебаний равно 1, время регулирования Трег=2,1с, а максимальное перерегулирование

Основные качественные параметры:
) Процесс является колебательным. Максимальное перерегулирование меньше 25%
)Уровень установившегося режима равен 1.
)Время регулирования (момент входа характеристики в пятипроцентную зону) Трег=2,1<Трег.доп=2,7, следовательно, удовлетворяет условиям.
Динамические свойства системы и, следовательно, качество процесса регулирования оценивают некоторыми количественными критериями. Полученные в результате проверки синтеза основные качественные оценки и необходимые запасы устойчивости отвечают заданным требованиям. Синтез САУ был проведён, верно.
Интересное из раздела
Проектирование зеркальных антенн для индивидуального приема спутниковых программ
Наибольший интерес в настоящее время представляет прием
телевидения в диапазоне 11…12 ГГц, для которого наиболее применимы
параболические антенны, так как п ...
Использование специализированных микропроцессоров
Рассмотрим
преимущества цифровой обработки сигналов (ЦОС) на сравнении аналоговых и
цифровых фильтров. Цифровые фильтры всё чаще находят своё применение в м ...
Проектирование двухполупериодного выпрямителя и Г-образного индуктивно-емкостного фильтра
Электроника
это наука, которая охватывает не только технику слабых токов, но технику
сильных токов, обычно относящихся к электротехнике, поскольку она опер ...