Разделы сайта
- Главная
- Электроника: интересно и познавательно
- Организация производства радиоэлектронной техники
- Телефонные переговоры по технологии IP-телефонии
- Информационно-компьютерная система службы видеонаблюдения
- Физические основы электроники
- Автоматические системы управления
- Цифровые устройства и приемники
Приняв начальные условия нулевыми, построить переходную характеристику САР
Качество работы любой системы регулирования характеризуется количественными и качественными показателями, которые определяются по кривой переходного процесса, либо по другим динамическим характеристикам системы. Переходный процесс в системе является ее реакцией на внешнее воздействие, которое в общем случае может быть сложной функцией времени. Обычно рассматривают поведение системы при следующих типовых воздействиях: единичной ступенчатой функции
1⋅(t), импульсной функции δ(t) и гармонической функции. Чаще всего прямые оценки качества (характер переходного процесса, время регулирования - tР и перерегулирование - σ,%) получают по кривой переходной характеристики h(t), т.е. при единичном ступенчатом входном воздействии 1⋅(t).
На характер переходного процесса влияют как числитель, так и знаменатель передаточной функции. Если передаточная функция замкнутой системы WЗС(s)не имеет нулей, т.е. имеет вид:
![]()
то характер переходного процесса полностью определяется корнями характеристического уравнения замкнутой системы:
a0·sn+ a1·sn-1+ a2·sn-2+ . . . + an=0
Если корни характеристического уравнения вещественные Si= αiто характер переходного процесса монотонный, рис. 10.1
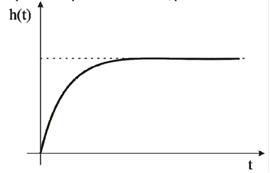
Рис. 10.1 Апериодический переходный процесс
Если корни вещественные Si= αi и комплексно-сопряженные Slk = αk±jbk и αk комплексных корней много больше αl вещественных, то характер переходного процесса колебательный (периодический), рис. 10.2
Если пара корней находится на оси ординат, а остальные в левой полуплоскости - переходный процесс колебательный с постоянной амплитудойи частотой. Система находится на границе устойчивости.
Если корни характеристического полинома замкнутой системы находятся влевой полуплоскости, то такую систему принято считать устойчивой.
Если хотябы один из корней находится в правой полуплоскости, а остальные в левой, тотакую систему принято считать неустойчивой.
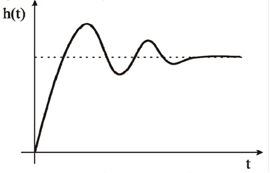
Рис. 10.2 Колебательный переходный процесс
Склонность системы к колебаниям характеризуется максимальным значением регулируемой величины
hmax
(рис. 10.3) или значением перерегулирования -
σ
,%.
![]()
где h
∞
- установившееся значение регулируемой величины после завершения переходного процесса
Быстродействие системы характеризуется длительностью переходного процесса tP. Время регулирования tP. (длительность переходного процесса) определяется как время, протекающее от момента приложения на вход системы воздействия до момента, после которого выполняется следующее неравенство:
│h(t) − h∞│£ Δh
где Δh - малая постоянная величина, представляющая собой заданную точность. В ТАУ принято задавать Δ= 0,05
Колебательные переходные процессы характеризуются периодом Tсоб и частотой ωсоб собственных колебаний.
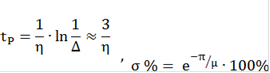
Степень устойчивости η представляет собой абсолютное значение вещественной оси до ближайшего корня(либо до пары комплексных корней). Колебательность
μ
представляет собой tg(j) (рис. 1.3). Время переходного процесса
tP
и σ
,%
связаны со степенью устойчивости ηи колебательностьюμ следующими соотношениями:
Интересное из раздела
Методы локализации неисправностей на аппаратуре СВ и РМ
Информация о воздушной
обстановке в виде формуляра кодограммы Т-РМ поступает от СВ в УУО блока УОП
АРМ.
Из узла управления
обменом тип принятого донесен ...
Расчет основных параметров радиоканала и радиопередающей части радиоканала
Приемопередающее
устройство - это источник и приемник радиочастотных колебаний в системах
радиосвязи, телевидения, радиолокации и других. Назначение приемоп ...
Проект макета на основе PIC контроллера
Сегодняшний день развития вычислительной техники характеризуется бурным
развитием сетевых технологий. При этом, основной упор делается на технологии,
позволяющи ...