Разделы сайта
- Главная
- Электроника: интересно и познавательно
- Организация производства радиоэлектронной техники
- Телефонные переговоры по технологии IP-телефонии
- Информационно-компьютерная система службы видеонаблюдения
- Физические основы электроники
- Автоматические системы управления
- Цифровые устройства и приемники
Схема блокировки устройства управления ГЛИН
Для обеспечения полного восстановления ГЛИН к моменту прихода очередного синхроимпульса и его надежной синхронизации необходимо предусмотреть блокировку устройства на время формирования обратного хода и формирование временной задержки очередного цикла работы, в течение которой генератор находится в режиме ожидания синхроимпульса. С этой целью предусмотрена схема, состоящая из эмиттерного повторителя на транзисторе, работающего в ключевом режиме, и интегрирующей цепи С1, R2. Во время рабочего хода емкость С1 заряжается до амплитудного значения возрастающего напряжения ГЛИН через малое выходное сопротивление повторителя. С момента формирования обратного хода напряжение на базе транзистора VT1 скачком уменьшается, а на эмиттере из-за наличия емкости оно мгновенно измениться не может, что приводит к запиранию транзистора и удержанию триггера в состоянии блокирования работы ГЛИН на время перезаряда С1 до значения напряжения порогового уровня, заданного цепью ПОС триггера. Далее процесс повторяется (автоколебательный режим). Для правильной работы необходимо, чтобы постоянная перезаряда С1 была выбрана существенно больше, чем время обратного хода генератора, что необходимо для полного восстановления схемы к моменту прихода очередного синхроимпульса, способного активно воздействовать на ГЛИН в течение времени задержки (режим синхронизации).
Схема блокировки устройства управления ГЛИН приведена на рисунке 4.
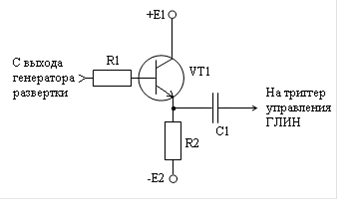
Рисунок 4 - Схема блокировки устройства управления ГЛИН
Эмиттерный повторитель должен работать в активном режиме во время формирования хода и закрываться с началом обратного хода. В качестве источника питания используем источник как для ОУ, т.е. Е1,2 = ±10 В, а для быстрого и надежного запирания рабочую точку выбираем вблизи области отсечки. Необходимо учесть, что резистором R2 в значительной степени определяется время задержки. Для того чтобы номинал емкости цепи задержки С1 был небольшим, сопротивление R2 должно быть достаточно высокоомным. В исходном состоянии напряжение на выходе ГЛИН, равное напряжению на базе VТ1, близко к нулю. В активном режиме Uбэ » 0,7 В, тогда падение напряжения на эмиттерном сопротивлении
![]() .(3.1)
.(3.1)
Зададимся эмиттерным током в рабочей точке Iэ0 = 200 мкА и найдем сопротивление
![]() .(3.2)
.(3.2)
Выбираем номинальное значение R2 = 47 кОм. Так как входное сопротивление и динамический диапазон эмиттерного повторителя велики, то базу транзистора можно непосредственно подключать к выходу ОУ. Однако для защиты ОУ от перегрузки по току в случае короткого замыкания (пробой переходов в VТ1) целесообразно включить в базу транзистора токоограничивающий резистор R1, значение сопротивления которого можно оценить по максимально возможному падению напряжения на нем и величине допустимого выходного тока ОУ
![]() .(3.3)
.(3.3)
Выбираем номинальное значение R1 = 1 кОм.
Рассчитаем значение емкости в цепи задержки. Перезаряд С1 во время формирования задержки происходит при закрытом транзисторе VТ1 через резистор R1 и резисторы R1, R2 схемы управления ГЛИН с постоянной времени ![]() . Длительность задержки можно рассчитать по выражению
. Длительность задержки можно рассчитать по выражению
![]() .(3.4)
.(3.4)
Максимальное напряжение, до которого емкость стремится зарядиться
![]()
Напряжение на емкости в конце рабочего хода
![]()
Напряжение прерывания процесса перезаряда
![]() .
.
Длительность задержки обычно составляет (0,1ч0,2) Тр, но для небольших интервалов развертки ее значение может быть выбрано постоянным по Тр, соответствующей среднему поддиапазону длительности развертки. Зададимся длительностью задержки tзад = 50 мкс. Значение емкости цепи задержки:
 .(3.5)
.(3.5)
Выбираем номинальное значение С1 = 1000 пФ.
Интересное из раздела
Анализ и синтез линейной системы автоматического управления
Анализ
системы автоматического управления
Исходные
данные:
Рассмотрим
структурную схему III
изображенную в табл. П-1.1.
Параметры
...
Проектирование генератора гармонических колебаний
Генераторы гармонических колебаний представляют собой электронные
устройства, формирующие на своем выходе периодические гармонические колебания
при отсутств ...
Расчет характеристик сигналов и каналов связи
На
современном этапе развития перед железнодорожным транспортом стоят задачи по
увеличению пропускной и провозной способности, грузовых и пассажирск ...