Разделы сайта
- Главная
- Электроника: интересно и познавательно
- Организация производства радиоэлектронной техники
- Телефонные переговоры по технологии IP-телефонии
- Информационно-компьютерная система службы видеонаблюдения
- Физические основы электроники
- Автоматические системы управления
- Цифровые устройства и приемники
Датчики ускорения, вибрации, удара, положения
датчик микросенсор преобразователь термопара
Отмечалось, что измерение ускорений (акселерометры, гироскопы и пр.) одно из направлений развития МСТ, которое идет очень быстро.
В основе измерений этих параметров лежат фундаментальные законы механики - связь между ускорением, силой и массой. Используют физические явления, позволяющие изучить электрический сигнал, связанный с этими законами.
Чаще всего непосредственно измеряют силу (пьезоэлектрические датчики) или косвенно - по перемещению или деформации чувствительного элемента, причем используют те же емкостные или тензорезистивные преобразователи.
Таким образом, в основе измерений обычно лежат общие принципы, а датчики больше различаются по назначению и условиям использования.
В частности, решают задачи:
1. Измерения ускорений движущихся объектов - самолетов, ракет, наземных или морских средств. Для измерения характерных для них малых ускорений и частот (от 0 до десятков Гц) обычно используют следящие акселерометры и датчики перемещений.
2. Измерения вибрационного ускорения жестких конструкций - до десятков кГц.
. Измерения ударов - т.е. импульсивных ускорений. Здесь нужны широкополосные датчики.
Принцип действия проще всего проиллюстрировать на примере сейсмического датчика (разумеется, не микросистемного). Он может быть (в зависимости от диапазона частот) датчиком перемещения, скорости или ускорения, которым подвергается корпус прибора (рис. 30).
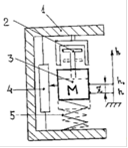
Рис. 30. Схема механической системы с одной степенью свободы:
- корпус; 2 - демпфер; 3 - инертная масса; 4 - устройство измерения перемещений; 5 - пружина.
Любой подобный датчик содержит механическую массу М и элемент, связывающий её с корпусом (кристалл пьезоэлектрика, гибкая пластина (пружина) и устройства преобразования параметров движения в электрический сигнал. Получается механическая система с одной степенью свободы.
h0 - ордината точки на корпусе (const),
h - ордината точки b на сейсмической массе.
В отсутствии ускорения ординаты a и b совпадают.
Z=h-h0 - перемещение сейсмической массы при ускорении.
Уравнение равновесия получим из баланса сил:
Cz - сила, возвращающая массу в положении равновесия,
![]() - сила вязкого трения (демпфер),
- сила вязкого трения (демпфер),
![]() - сила ускорения массы М.
- сила ускорения массы М.
Уравнение равновесия:
![]() .
.
Его решение позволяет определить скорость и ускорение при механическом воздействии на корпус прибора.
Интересное из раздела
Расчет основных параметров радиоканала и радиопередающей части радиоканала
Приемопередающее
устройство - это источник и приемник радиочастотных колебаний в системах
радиосвязи, телевидения, радиолокации и других. Назначение приемоп ...
20-разрядный аналого-цифровой преобразователь, изготовленный по технологии КМОП 0,9 пм
Традиционные
конструкции аналого-цифровых преобразователей (АЦП) использовали параллельную
архитектуру и биполярные технологии для получения 8-битного разрешени ...
Расчет параметров четырехполюсника
Системы
автоматики, телемеханики и связи на железнодорожном транспорте представляют
собой технические средства управления перевозочным процессом, способству ...