Разделы сайта
- Главная
- Электроника: интересно и познавательно
- Организация производства радиоэлектронной техники
- Телефонные переговоры по технологии IP-телефонии
- Информационно-компьютерная система службы видеонаблюдения
- Физические основы электроники
- Автоматические системы управления
- Цифровые устройства и приемники
Обработка зоны допустимого нахождения манипулятора
Допустимую зону движения задаем при помощи линий, определяющихся при помощи линейной функции ![]() и для каждой линии задается с какой стороны от линии располагается допустимая зона.
и для каждой линии задается с какой стороны от линии располагается допустимая зона.
Такими функциями задаются выпуклые подзоны, из которых можно составить зону произвольной конфигурации.
Программа проверяет попадание заданной координаты хотя бы в одну из подзон поверхности.
Для каждой подзоны последовательно проверяется расположение точки относительно каждой линии подзоны.
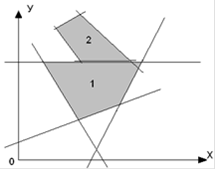
Рис. 1 Пример зоны, состоящей из двух выпуклых подзон
Логика перемещения манипулятора
Исходные требования
Манипулятор перемещается между линейными координатами.
Движение манипулятора в зоне может быть не прямолинейным, а состоять из нескольких участков.
Первоначально необходимо проверять, чтобы конечная точка попадала в зону.
Перемещение целесообразно осуществлять при помощи формирования минипрограммы перемещения, каждый пункт минипрограммы - линейное движение в некоторую точку.
Определение Линейных участков движения
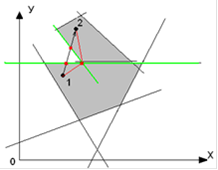
определяем уравнение линии исходного перемещения
определяем подзоны, в которых находятся исходная и конечная точки
. определяем с какими краевыми линиями пересекается линейная траектория
. находим точку пересечения этих краевых линий
. Составляем маршрут 1->3->2.
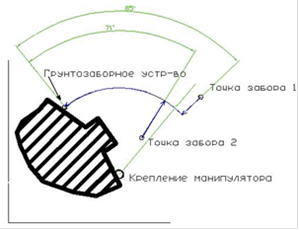
Особенность манипулятора в том, что движение в плоскости производится поворотом манипулятора, также зона ограничена только стенкой аппарата
также необходимо учитывать минимизацию движений.
Поэтому осуществлять поворот манипулятора целесообразно следующим образом:
. Поднимаем захват манипулятора на высоту грунтозаборного устройства + 3 см.
2. Определяем радиусы окружностей проходящих через точку забора (![]() ) и через точку выгрузки грунта (
) и через точку выгрузки грунта (![]() )
)
. Производим линейное перемещение захвата манипулятора в точку, расположенную на окружности с радиусом ![]() Движение осуществляется последовательно сначала двигателем мотором узла поворота 1, потом двигателем узла поворота 3 и окончательно двигателем мотором узла поворота 2.
Движение осуществляется последовательно сначала двигателем мотором узла поворота 1, потом двигателем узла поворота 3 и окончательно двигателем мотором узла поворота 2.
. Вычисляем требуемый угол разворота манипулятора и производим разворот манипулятора к грунтозаборному устройству
. Опускаем захват в приемник грунтозаборного устройства на 3 см.
. Раскрываем захват.
. Выталкиваем грунт в грунтозаборное устройство.
Алгоритм расчета параметров программы перемещения
1. Вычисляем радиальные координаты точки нахождения манипулятора
2. Вычисляем радиальные координаты точки выгрузки
. Формируем строки программы
.4.1 Вычисление текущих радиальных координат
Для выполнения расчетов необходимо знать высоту расположения манипулятора ![]() , удаление от основания R и угол разворота манипулятора
, удаление от основания R и угол разворота манипулятора ![]()
Интересное из раздела
Автоматическая система управления
В настоящее время широко используются микропроцессорные устройства и системы. Их назначение и область применения очень велика. Так, различного рода микропроцессорные сист ...
Организация аудиовидеконференцсвязи
В настоящее время технологии видеоконференцсвязи находятся в стадии
динамичного развития во всех, без исключения, развитых странах мира.
Преимущества компью ...
Расчет основных параметров радиоканала и радиопередающей части радиоканала
Приемопередающее
устройство - это источник и приемник радиочастотных колебаний в системах
радиосвязи, телевидения, радиолокации и других. Назначение приемоп ...