Разделы сайта
- Главная
- Электроника: интересно и познавательно
- Организация производства радиоэлектронной техники
- Телефонные переговоры по технологии IP-телефонии
- Информационно-компьютерная система службы видеонаблюдения
- Физические основы электроники
- Автоматические системы управления
- Цифровые устройства и приемники
Обработка зоны допустимого нахождения манипулятора
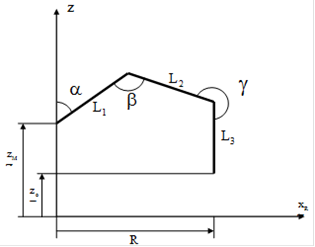
Зная текущие углы поворота колен определяем ![]() и R :
и R :

Угол разворота манипулятора ![]() вычисления не требует, так как измеряется непосредственно.
вычисления не требует, так как измеряется непосредственно.
.4.2 Вычисление радиальных координат точек разгрузки
Координаты точки разгрузки определяем при помощи подпрограммы преобразования линейных координат в углы разворота колен манипулятора
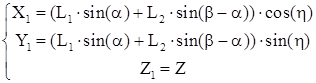
Calculate_angles(x : real, y : real, z : real): TRealArray5 Далее по выше указанной формуле определяем координаты ![]() ,
, ![]() , угол разворота манипулятора к грунтозаборному устройству - есть константа
, угол разворота манипулятора к грунтозаборному устройству - есть константа ![]()
.4.3 Формирование программы
Этапы движения манипулятора описаны выше в разделе приведения в точку.
Подробно программа выглядит следующим образом:
. Подъем манипулятора. Определяем текущие координаты X, Y, Z. Задаем ![]() . Пересчитываем углы положения манипулятора. Результаты расчета преобразуем в 3 последовательных пункта программы с вращением соответственно по углам
. Пересчитываем углы положения манипулятора. Результаты расчета преобразуем в 3 последовательных пункта программы с вращением соответственно по углам ![]() .
.
. Приведение к радиусу грунтозаборника. Определяем текущий радиус R и угол ![]() по ранее указанной формуле. Вычисляем разность радиусов
по ранее указанной формуле. Вычисляем разность радиусов ![]() рассчитываем координаты точки 1(с
рассчитываем координаты точки 1(с ![]() )
) ![]() по формулам
по формулам
Пересчитываем углы положения манипулятора. Результаты расчета преобразуем в 3 последовательных пункта программы с вращением соответственно по углам ![]() .
.
. Вращение манипулятора. Добавляем в программу пункт программы с вращением осонвания манипулятора в требуемый угол ![]()
. Опускаем захват манипулятора в грунтозаборник. Определяем текущие координаты X, Y, Z. Задаем ![]() . Пересчитываем углы положения манипулятора. Результаты расчета преобразуем в 3 последовательных пункта программы с вращением соответственно по углам
. Пересчитываем углы положения манипулятора. Результаты расчета преобразуем в 3 последовательных пункта программы с вращением соответственно по углам ![]() .
.
. Добавляем пункт раскрытия лепестков захвата
. Добавляем пункт выдвижения поршня манипулятора на 5 см.
Дальнейшие действия определяются по ситуации.
Интересное из раздела
Анализ и синтез линейной системы автоматического управления
Анализ
системы автоматического управления
Исходные
данные:
Рассмотрим
структурную схему III
изображенную в табл. П-1.1.
Параметры
...
Построение телефонной сети малого предприятия на программной АТС Asterisc
В настоящее время телекоммуникационные технологии находятся на столь высоком
уровне развития, что внедряются абсолютно в любые устройства, начи ...
Проект кабельной линии
Железнодорожная сеть представляет собой единую, работающую по
общему плану систему, части которой взаимодействуют друг с другом. Работа всех
звеньев министе ...