Разделы сайта
- Главная
- Электроника: интересно и познавательно
- Организация производства радиоэлектронной техники
- Телефонные переговоры по технологии IP-телефонии
- Информационно-компьютерная система службы видеонаблюдения
- Физические основы электроники
- Автоматические системы управления
- Цифровые устройства и приемники
Практическая составляющая
ЗАКЛЮЧЕНИЕ
Был спроектирован макет на основе PIC контроллера. При этом, рассматривались характеристики PIC контроллеров из разных семейств и из всех был выбран один включивший в себя все положительные стороны остальных. Макет рассчитан на малые нагрузки, и поэтому его очень удобно использовать на практических занятиях в учебных заведениях.
Согласно заданию была рассчитана себестоимость макета.
Данный дипломный проект позволил мне стать более компетентным, конкурентоспособным, квалифицированным специалистом, которые ценятся в современном мире. Для меня откроются более широкие возможности реализовать себя на рынке труда, и позволит получить достойный заработок соответствующий моей квалификации Так что можно с уверенностью сказать, что проделанная мною работа помогла мне стать опытным специалистом. Я повысил свой профессиональный уровень.
Список используемых сокращений
1. PIC - Peripheral Interface Controller (Периферийный интерфейс контроллера);
2. БП - блок питания
. БУ - блок управления
. БК - блок камутации
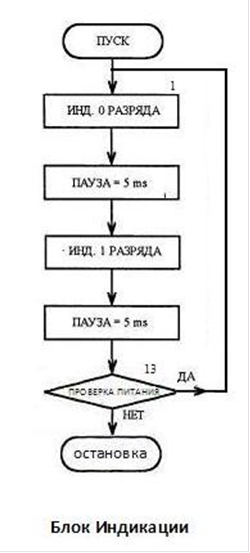
. БИ - блок индикации
6. GND - Ground (земля);
7. USB - Universal Serial Bus (универсальная последовательная шина);
8. COM - Communication port (соединяющий порт);
. ADC (АЦП) - Analog-to-digital converter (аналого-цифровой преобразователь);
. MIPS - Million Instructions Per Second (миллион инструкций в секунду);
. EEPROM - Electrically Erasable Programmable Read-Only Memory (электрически стираемое перепрограммируемое постоянное запоминающее устройство);
. ПК - Персональный Компьютер;
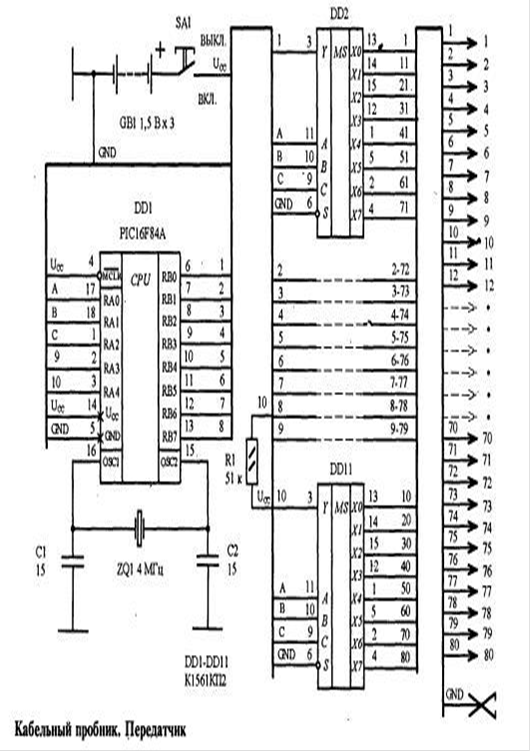
ПРИЛОЖЕНИЕ А
. Принципиальная схема передатчика
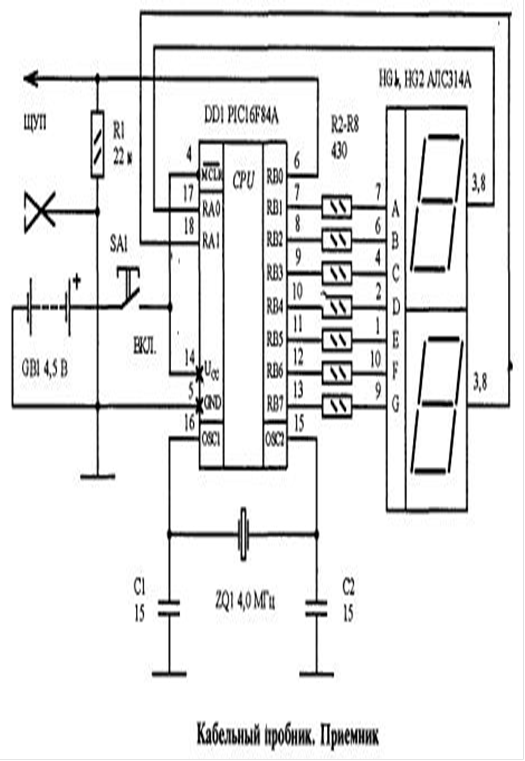
ПРИЛОЖЕНИЕ B
2. Принципиальная схема приемника
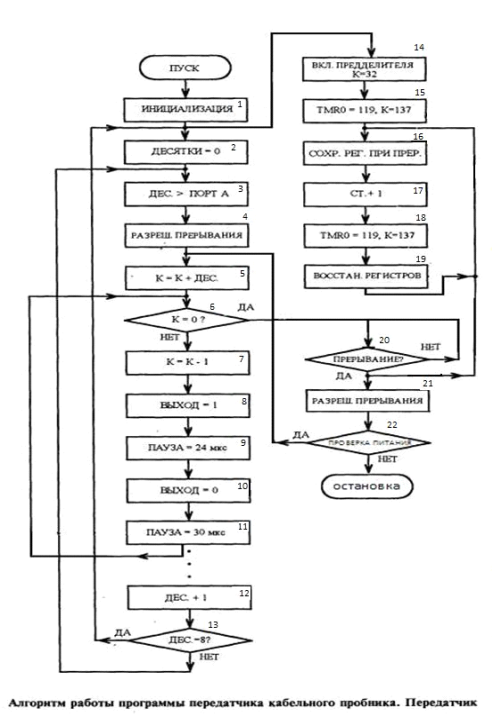
ПРИЛОЖЕНИЕ C
3. Алгоритм работы передатчика
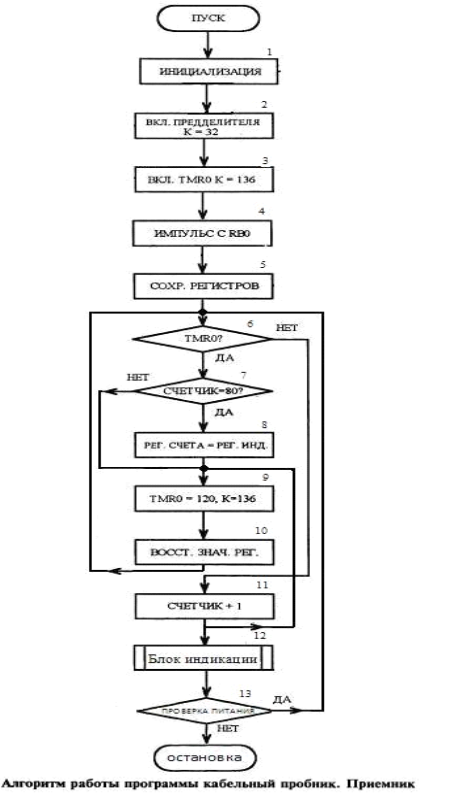
ПРИЛОЖЕНИЕ D
4. Алгоритм работы приемника
ПРИЛОЖЕНИЕ E
5. Текст программы передатчика
;
; КАБЕЛЬНЫЙ ПРОБНИК НА 80 НАПРАВЛЕНИЙ,
; ПЕРЕДАТЧИК.
; РАЗРАБОТАЛ ГАСАНОВ ПЕТР.
;
; ПРОГРАММА = KABELPD.ASM
; ВЕРСИЯ: 08-05-11.
; АССЕМБЛЕР И ОТЛАДЧИК: MPLAB IDE, ВЕРСИЯ: 5.61.00.
;
#include p16f84a.inc
CONFIG 3FF1H
;=========================================
; ИСПОЛЬЗУЕТСЯ КВАРЦ ЧАСТОТОЙ 4,0 МГЦ.
;=========================================
; RB0=1, RB1=2, RB2=3, RB4=4, RB5=6, RB6=7, RB7=8,
; RA3=9, RA4=10, RA0-RA2 - ВЫХОД ДЕСЯТКОВ.
;=========================================
; СПЕЦ РЕГИСТРЫ.
;=========================================EQU 00H ;ДОСТУП К ПАМЯТИ ЧЕРЕЗ FSR.
TIMER0 EQU 01H ;TMR0.EQU 81H ;OPTION (RP0=1).
PC EQU 02H ;СЧЕТЧИК КОМАНД.EQU 03H ;РЕГИСТР СОСТОЯНИЯ АЛУ.EQU 04H ;РЕГИСТР КОСВЕННОЙ АДРЕСАЦИИ.EQU 05H ;ПОРТ А ВВОДА/ВЫВОДА.EQU 06H ;ПОРТ В ВВОДА/ВЫВОДА.EQU 85H ;НАПРАВЛЕНИЯ ДАННЫХ ПОРТА А.EQU 86H ;НАПРАВЛЕНИЯ ДАННЫХ ПОРТА В.EQU 0BH ;РЕГИСТР ФЛАГОВ ПРЕРЫВАНИЙ.
;===========================================
; ОПРЕДЕЛЕНИЕ РЕГИСТРОВ.
;===========================================EQU 0CH ;МЛАДШИЙ РЕГИСТР ВЫХОДНЫХ ИМПУЛЬСОВ.
SC1 EQU 0DH ;EQU 0EH ;EQU 0FH ;EQU 10H ;EQU 11H ;EQU 12H ;EQU 13H ;EQU 14H ;
SC9 EQU 15H ;СТАРШИЙ РЕГИСТР.EQU 16H ;СЧЕТЧИК ПАУЗЫ.EQU 17H ;СЧЕТЧИК ПРЕРЫВАНИЙ.EQU 18H ;РЕГИСТР ДЕСЯТКОВ.
;========================================
; ВРЕМЕННЫЕ РЕГИСТРЫ.
;========================================_TEMP EQU 19H ;БАЙТ СОХРАНЕНИЯ РЕГИСТРА W ПРИ ПРЕРЫВАНИИ._TEMP EQU 1AH ;БАЙТ СОХРАНЕНИЯ РЕГИСТРА STATUS ПРИ ПРЕРЫВАНИИ._TEMP EQU 1BH ;ВРЕМЕННЫЙ ДЛЯ FSR.
;=========================
; 1. ПУСК.
;=========================0INIT4
GOTO CONST
;======================
; 2. ИНИЦИАЛИЗАЦИЯ.
;======================STATUS,RP0 ;ПЕРЕХОДИМ В БАНК 1.B'00000100' ;ПРЕДДЕЛИТЕЛЬ ПЕРЕД ТАЙМЕРОМ, К=32 .100,OPTION_REG^80H ;ПОДТЯГИВАЮЩИЕ РЕЗИСТОРЫ ПОДКЛЮЧЕНЫ.B'10100000' ;РАЗРЕШЕНИЕ ПРЕРЫВАНИЯ = ПРИ ПЕРЕПОЛНЕНИИ ТАЙМЕРА.INTCON ;B'00000000' ; RA0-RA4-НА ВЫХОД.TRISA^80HB'00000000' ; RB0-RB7-НА ВЫХОД.TRISB^80HSTATUS,RP0 ;ПЕРЕХОДИМ В БАНК 0.TMR0 ;ВСЕ ОБНУЛЯЕМ И УСТАНАВЛИВАЕМ
CLRF SC0SC1SC2SC3SC4SC5SC6SC7SC8
CLRF SC9IDOO ;ИДЕМ НА ФОРМИРОВАНИЕ ИМПУЛЬСОВ.
;======================================
; 3. ТАБЛИЦА ПЕРЕКОДИРОВКИ.
;======================================PC,1
RETLW .0.10.20.30.40.50.60.70
;========================================
; 4. ВЫВОД ИМПУЛЬСОВ.
;========================================ANOD ;ОБНУЛЯЕМ ДЕСЯТКИ.ANOD ;ПЕРЕПИШЕМ ЗНАЧЕНИЕ ДЕСЯТКОВPORTA ;В ПОРТ А.
;==============================================INTCON,7 ;РАЗРЕШАЕМ ПРЕРЫВАНИЯ 1 ;ЗАПИШЕМ КОНСТАНТУSC0 ;В РЕГИСТР ВЫХОДА.
MOVFW ANOD ;УЗНАЕМDES ;ДЕСЯТКИ.SC0,1 ;ПРОСУММИРУЕМ.ZSC0 ;ЕСЛИ
Интересное из раздела
Калибровка мониторов на основе науки о цвете – колориметрии
Полиграфическая индустрия активно развивается и предлагает
клиентам все больше новых и интересных решений. Также растет требовательность
заказчиков к резуль ...
Взаимодействие сигналов контроля в сети NGSDH с трактами VC-12
Телекоммуникации всегда были одной из бурно развивающихся
отраслей. С момента зарождения и до нашего времени, сети электросвязи прошли
через целый ряд революц ...
Цифровая система автоматического управления
Необходимо спроектировать цифровую систему автоматического управления (ЦСАУ).
Система должна принимать сигнал из датчика, который находит в диапазоне 0…24В. Задаю ...