Разделы сайта
- Главная
- Электроника: интересно и познавательно
- Организация производства радиоэлектронной техники
- Телефонные переговоры по технологии IP-телефонии
- Информационно-компьютерная система службы видеонаблюдения
- Физические основы электроники
- Автоматические системы управления
- Цифровые устройства и приемники
Разработка математической модели цифрового сигнала
Для разработки математической модели цифрового сигнала примем четыре кодовых слова (коды четырех отсчетов).
Числовые константы сигнала определяются по формулам (2.8) и (2.9). Математическое ожидание:
 . (2.8)
. (2.8)
Дисперсия:
 . (2.9)
. (2.9)
Выбранная кодовая последовательность:
Вероятность нуля: ![]()
Вероятность единицы: ![]()
Рассчитаем математическое ожидание сигнала по (2.8).
![]() В.
В.
Рассчитаем дисперсию:
![]() В.
В.
Рассчитаем функцию автокорреляции. При проведении расчетов воспользуемся возможностями программы MathCAD. Поступим следующим образом. Выпишем четыре последовательности кодов, которыми представляется дискретизированный сигнал; это будет последовательность нулей и единиц. В среде MathCAD. создадим два вектора ![]() и
и ![]() . Далее воспользуемся функцией
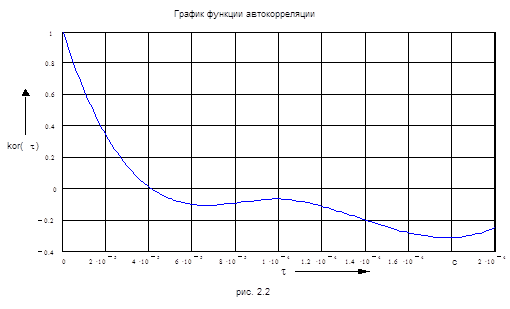
. Далее воспользуемся функцией ![]() . После каждого измерения будем сдвигать кодовую последовательность вектора Vy на один знак. Проведём семь расчётов. Результаты занесём в табл. 2.2.
. После каждого измерения будем сдвигать кодовую последовательность вектора Vy на один знак. Проведём семь расчётов. Результаты занесём в табл. 2.2.
Таблица 2.2 Функция автокорреляции кодового сигнала
|
t, мкс |
0 |
50 |
100 |
150 |
200 |
250 |
300 |
350 |
|
Corr |
1 |
-0.066667 |
-0.066667 |
-0.244444 |
-0.244444 |
0.111111 |
-0.244444 |
0.288889 |
В среде MathCAD по этой таблице сформируем два вектора Vt и Vk:
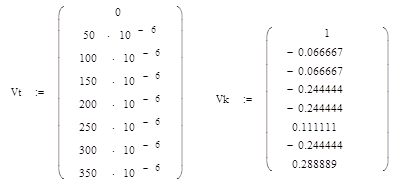
С помощью функции cspline(Vt, Vk) вычислим вектор VS вторых производных при приближении к кубическому полиному:
|
VS : = cspline (Vt, Vk) |
|
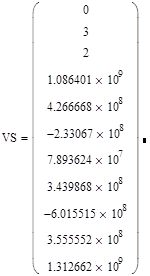
Далее вычисляем функцию, аппроксимирующую функцию автокорреляции сплайн кубическим полиномом:
kor(t) : = interp (VS, Vt, Vk, t).
График функции автокорреляции изображен на рис. 2.2.
Спектральные характеристики кодированного сигнала находятся на основании интегрального преобразования Винера-Хинчина. В области действительной переменной оно имеет следующий вид:
 . (2.10)
. (2.10)
Здесь K(t) выше рассчитанная нормированная функция kor(t), верхний предел T - последнее рассчитанное значение t.
Решение интеграла произведём в среде MathCAD.
Спектр кодированного сигнала, построенный по (2.10) показан на рис. 2.3.

Интересное из раздела
Цифровая система автоматического управления
Необходимо спроектировать цифровую систему автоматического управления (ЦСАУ).
Система должна принимать сигнал из датчика, который находит в диапазоне 0…24В. Задаю ...
Шлюз ZigBee и GPRS
Беспроводные сенсорные сети получили большое развитие в
последнее время. Такие сети, состоящие из множества миниатюрных узлов,
оснащенных маломощным приемо- ...
Исследование аналого-цифрового и цифрового преобразователей
Аналого-цифровые преобразователи
предназначены для преобразования непрерывных (аналоговых) сигналов в дискретные
(цифровые), которые могут использоваться в ...