Разделы сайта
- Главная
- Электроника: интересно и познавательно
- Организация производства радиоэлектронной техники
- Телефонные переговоры по технологии IP-телефонии
- Информационно-компьютерная система службы видеонаблюдения
- Физические основы электроники
- Автоматические системы управления
- Цифровые устройства и приемники
Полосовая модуляция и демодуляция
В передатчике АСТСП для передачи цифровой информации выбрана частотная манипуляция. Дискретному значению равному единице, соответствует частота 16 кГц, нулю - 12 кГц. В течение каждого символьного интервала передается гармоническое колебание с частотой, соответствующей текущему символу. Символьная скорость передачи составляет 2 кГц и определяется следующим образом:
(2.7)
где ![]() - период поступления символа от источника.
- период поступления символа от источника.
Выбор данного вида манипуляции передатчиком не случаен. Значение амплитуды сигнала является неустойчивым параметром к влиянию шума [10], в виду чего амплитудная манипуляция не может быть использована. Не рационально применять и фазовую манипуляцию, так как она сложна в реализации.
Детектирование частотно-манипулированного сигнала
Передатчик АСТСП транслирует управляющий сигнал, в котором информация представлена конечным набором частот в определенной последовательности. При этом, такой параметр сигнала, как фаза, не несет никакой «смысловой» нагрузки. По этой причине в приемнике АСТСП используется демодулятор, спроектированный для работы без знания абсолютной величины фазы входного сигнала, именуемый некогерентным детектором.
Некогерентный детектор FSK - модулированных сигналов, реализуется с помощью корреляторов [8]. На Рис. 2.3 представлена схема квадратурного приемника. Синфазный (I) и квадратурный (Q) каналы используются для не когерентного детектирования набора сигналов в бинарной модуляции FSK (BFSK). Две верхние ветви настроены на детектирование сигнала с частотой ![]() : для синфазной ветви опорный сигнал имеет вид
: для синфазной ветви опорный сигнал имеет вид ![]() , а для квадратурной -
, а для квадратурной - ![]() . Подобным образом две нижние ветви настроены на детектирование сигнала с частотой
. Подобным образом две нижние ветви настроены на детектирование сигнала с частотой ![]() : для синфазной ветви опорный сигнал имеет вид
: для синфазной ветви опорный сигнал имеет вид ![]() , а для квадратурной -
, а для квадратурной - ![]() .
.
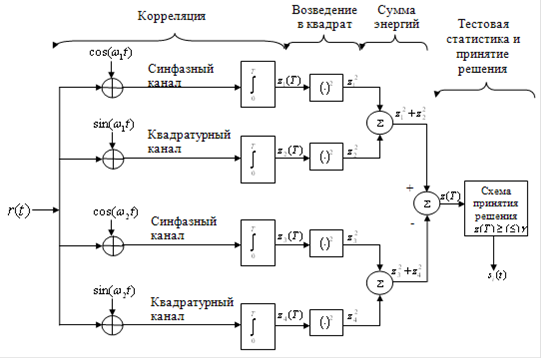
Рис.2.3 Квадратурный приемник.
Предположим, что принятый сигнал ![]() имеет вид
имеет вид ![]() , т.е. фаза точно равна нулю. Следовательно, сигнальный компонент принятого сигнала точно соответствует (по частоте и фазе) опорному сигналу верхней ветви. В такой ситуации максимальный выход должен дать интегратор произведений верхней ветви. Вторая ветвь должна дать нулевой выход (проинтегрированный шум с нулевым средним), поскольку ее опорный сигнал
, т.е. фаза точно равна нулю. Следовательно, сигнальный компонент принятого сигнала точно соответствует (по частоте и фазе) опорному сигналу верхней ветви. В такой ситуации максимальный выход должен дать интегратор произведений верхней ветви. Вторая ветвь должна дать нулевой выход (проинтегрированный шум с нулевым средним), поскольку ее опорный сигнал ![]() ортогонален сигнальному компоненту сигнала
ортогонален сигнальному компоненту сигнала ![]() . При ортогональной передаче сигналов третья и четвертая ветви также должны дать близкие к нулю выходы порядка нуля, поскольку их опорные сигналы также ортогональны сигнальному компоненту сигнала
. При ортогональной передаче сигналов третья и четвертая ветви также должны дать близкие к нулю выходы порядка нуля, поскольку их опорные сигналы также ортогональны сигнальному компоненту сигнала ![]() .
.
Рассмотрим теперь другую возможность. Пусть принятый сигнал ![]() имеет вид
имеет вид ![]() . В этом случае максимальный выход должна дать вторая ветвь схемы, а выходы других ветвей должны быть близки нулю. В реальной системе сигнал
. В этом случае максимальный выход должна дать вторая ветвь схемы, а выходы других ветвей должны быть близки нулю. В реальной системе сигнал ![]() скорее всего описывается выражением
скорее всего описывается выражением ![]() , т.е. входной сигнал будет частично коррелировать с опорным сигналом
, т.е. входной сигнал будет частично коррелировать с опорным сигналом ![]() и частично - с сигналом
и частично - с сигналом ![]() . Поэтому некогерентный квадратурный приемник ортогональных сигналов и требует синфазной и квадратурной ветви для каждого возможного сигнала набора. Блоки, показанные на Рис. 2.3 после интеграторов произведений, выполняют операцию возведения в квадрат, что предотвращает появление возможных отрицательных значений. Затем для каждого класса сигналов набора (в бинарном случае - для двух) складываются величины
. Поэтому некогерентный квадратурный приемник ортогональных сигналов и требует синфазной и квадратурной ветви для каждого возможного сигнала набора. Блоки, показанные на Рис. 2.3 после интеграторов произведений, выполняют операцию возведения в квадрат, что предотвращает появление возможных отрицательных значений. Затем для каждого класса сигналов набора (в бинарном случае - для двух) складываются величины ![]() из синфазного канала и
из синфазного канала и ![]() из квадратурного канала. На конечном этапе формируется тестовая статистика
из квадратурного канала. На конечном этапе формируется тестовая статистика ![]() и выбирается сигнал с частотой
и выбирается сигнал с частотой ![]() или
или ![]() , в зависимости от того, какая пара детекторов энергии дала максимальный выход.
, в зависимости от того, какая пара детекторов энергии дала максимальный выход.
Интересное из раздела
Расчет установившихся режимов линейных электрических цепей
Данная работа представляет собой обобщение работы, проведенной за время
обучения теоретических основ электротехники. Фактически всю работу можно
разделить н ...
Расчет параметров различных видов сигналов
В последнее десятилетие ХХ века произошла научно-техническая
революция в области транспортной связи, в основе которой лежат два крупных
достижения науки сер ...
Моделирование цифро-аналоговых преобразователей
С введением новых телевизионных стандартов, таких как EDTV (телевидение повышенной четкости) и HDTV(телевидение высокой четкости) повышаются требования к АЦП и ЦАП. Некот ...