Разделы сайта
- Главная
- Электроника: интересно и познавательно
- Организация производства радиоэлектронной техники
- Телефонные переговоры по технологии IP-телефонии
- Информационно-компьютерная система службы видеонаблюдения
- Физические основы электроники
- Автоматические системы управления
- Цифровые устройства и приемники
Расчет входных сопротивлений четырехполюсника (ЧП) в режимах короткого замыкания (КЗ) и холостого хода (ХХ)
Схема ЧП представлена на рис. 2.1.
Схема исследуемого ЧП
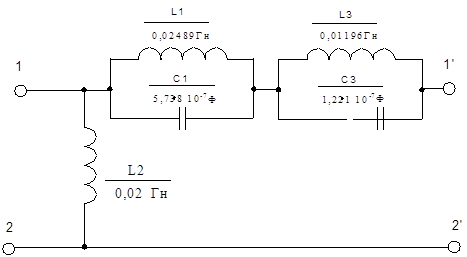
Рис. 2.1
Входное сопротивление ЧП в режиме ХХ при прямом направлении передачи энергии
![]() , (2.1)
, (2.1)
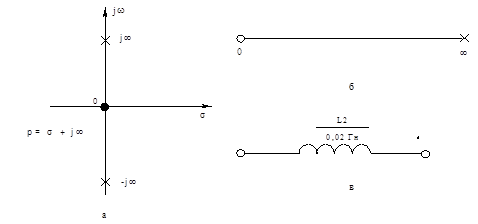
Рис. 2.2
По результатам расчета (см. табл. 2.1) построим график частотной зависимости Z1хх (w), рис. 2.6.
Таблица 2.1. Частотная зависимость сопротивления Z1хх (w)
|
Угловая частота w, c-1 | |
|
0 |
0+40e-8i |
|
2.5e3 |
0+100i |
|
5e3 |
0+200i |
|
7e3 |
0+300i |
|
1e4 |
0+400i |
|
1.25e4 |
0+500i |
|
1.5e4 |
0+600i |
|
1.75e4 |
0+700i |
Входное сопротивление ЧП в режиме КЗ при прямом направлении передачи энергии
![]() , (2.2)
, (2.2)
Резонанс напряжений:
![]() .
.
Резонансы токов:
По результатам расчета (см. табл. 2.2) построим график частотной зависимости Z1кз (w), рис. 2.6.
Таблица 2.2. Частотная зависимость сопротивления Z1кз (w)
|
Угловая частота w, c-1 |
|
|
1 |
2 |
|
1.000e-13 |
0.000+1.867e-15i |
|
2.500e3 |
0.000+48.419i |
|
5.000e3 |
0.000+110.306i |
|
7.500e3 |
0.000+232.535i |
|
1.000e4 |
0.000+2.857e3i |
Входное сопротивление ЧП в режиме ХХ при обратном направлении передачи энергии
![]() , (2.3)
, (2.3)
Резонанс напряжений:
 .
.
Резонанс токов:
По результатам расчета (см. табл. 2.3) построим график частотной зависимости Z2хх(w), рис. 2.6.
Таблица 2.3. Частотная зависимость сопротивления Z2хх (w)
|
Угловая частота w, c-1 | |
|
1.000e-13 |
0.000+7.503e-15i |
|
2.500e3 |
0.000+193.868i |
|
5.000e3 |
0.000+445.959i |
|
7.500e3 |
0.000+1.334e3i |
|
1.000e4 |
0.000-65.116i |
|
1.250e4 |
0.000+403.928i |
|
1.500e4 |
0.000+640.928i |
|
1.750e4 |
0.000+854.371i |
|
2.000e4 |
0.000+1.091e3i |
|
2.250e4 |
0.000+1.410e3i |
|
2.500e4 |
0.000+2.002e3i |
|
2.750e4 |
0.000+4.829e3i |
|
3.000e4 |
0.000-1.813e3i |
|
3.250e4 |
0.000+125.454i |
|
3.500e4 |
0.000+640.540i |
|
3.750e4 |
0.000+926.470i |
|
4.000e4 |
0.000+1.133e3i |
|
4.250e4 |
0.000+1.303e3i |
|
4.500e4 |
0.000+1.453e3i |
|
4.750e4 |
0.000+1.590e3i |
|
5.000e4 |
0.000+1.719e3i |
Интересное из раздела
Расчет характеристик сигналов и каналов связи
В последнее десятилетие ХХ века произошла научно-техническая революция в
области транспортной связи, в основе которой лежат два крупных достижения ...
Построение телефонной сети малого предприятия на программной АТС Asterisc
В настоящее время телекоммуникационные технологии находятся на столь высоком
уровне развития, что внедряются абсолютно в любые устройства, начи ...
Организация и расчет сетей поездной и станционной радиосвязи
Бурное развитие радиотехники создало все предпосылки для
широкого использования радиосредств на железнодорожном транспорте. Массовое
внедрение радиосвязи н ...