Разделы сайта
- Главная
- Электроника: интересно и познавательно
- Организация производства радиоэлектронной техники
- Телефонные переговоры по технологии IP-телефонии
- Информационно-компьютерная система службы видеонаблюдения
- Физические основы электроники
- Автоматические системы управления
- Цифровые устройства и приемники
Коррекция автоматических систем
Задана следящая система, у которой входная величина - это угол поворота задающей оси α1, а выходная величина - угол поворота оси отработки α2.
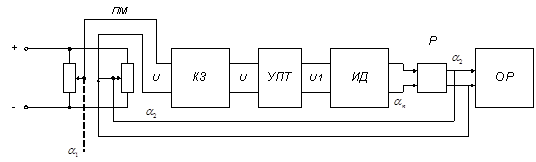
В системе используется:
|
ПМ - потенциально метрический мост |
α = α1 - α1 U = K1* α, К1 = 1 В/град = 57,3 В/рад |
|
УПТ - усилитель постоянного тока |
U1 (1+TyP) = K2U K2 = 105; Ty = 5*10-3 с |
|
ИД - исполнительный двигатель |
При Мпуск = 0,α1p (1+Tдвp) = K3U1 K3 = 50 рад/с; Tдв = 2*10-2с |
|
Р - редуктор |
α 2 = К4αИ К4 = 10-3 |
|
ОР - объект управления |
Найти передаточную функцию разомкнутой системы, её комплексный коэффициент усиления, построить ЛАЧХ и ЛФЧХ. Определить устойчивость разомкнутой системы, частоту среза и запас устойчивости по фазе.
Найти передаточную функцию корректирующей цепи и её комплексный коэффициент усиления. Выбрать параметры корректирующей цепи такие, чтобы достичь устойчивости системы и сделать вывод об устойчивости и качестве регулирования скорректированной системы.
Нескорректированная САР
Под улучшением качества процесса регулирования, помимо повышения точности в типовых режимах, понимают изменение динамических свойств системы регулирования с целью получения необходимого запаса устойчивости и быстродействия. В этой проблеме основное значение имеет обеспечения запаса устойчивости. Это можно объяснить тем, что стремление снизить ошибки системы регулирования приводит, как правило, к необходимости использовать такие значения общего коэффициента усиления, при которых без принятия специальных мер система вообще оказывается неустойчивой.
При решении задачи повышения запаса устойчивости проектируемой системы регулирования прежде всего необходимо попытаться рациональным образом изменить её параметры (коэффициенты передачи отдельных звеньев, постоянные времени и т.п.) так, чтобы удовлетворить требованиям качества регулирования, которые определяются критериями качества. При невозможности решить эту задачу в рамках имеющейся системы приходиться идти на изменение её структуры. Для этой цели обычно используется введение в систему регулирования так называемых корректирующих средств, которые должны изменить динамику всей системы в нужном направлении.
К корректирующим средствам относятся, в частности, корректирующие звенья, представляющие собой динамические звенья с определенными передаточными функциями. Получение требуемого быстродействия обычно обеспечивается при проектировании системы регулирования по средствам выбора соответствующих элементов цепи регулирования (исполнительных органов, усилителей, серводвигателей и т.п.). Однако возможно улучшение быстродействия системы по средствам использования корректирующих средств.
В данной задаче я применяю способ корректирования, при котором происходит изменение её структуры (применение дополнительного звена), т.к. коэффициенты звеньев системы заданы и регулированию не поддаются.
Заменим данную систему следующей структурой:

Запишем передаточную функцию для разомкнутой системы:
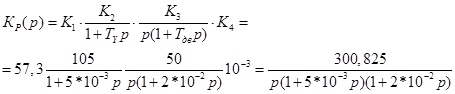
Тогда коэффициент усиления будет равен:
![]()
Комплексный коэффициент усиления будет равен:

ЛАЧХ я строю использую асимптотический метод. Кривая будет иметь 2 излома в точках ![]() . Прямая пойдет из точки 49,5 дБ при w=1. Начальный наклон прямой будет 20дБ/декаду, в точках излома наклон будет меняться на 40 и 60 дБ/декаду.
. Прямая пойдет из точки 49,5 дБ при w=1. Начальный наклон прямой будет 20дБ/декаду, в точках излома наклон будет меняться на 40 и 60 дБ/декаду.
Интересное из раздела
Беспроводные локальные сети Wlan (wi-fi)
Так
сложилось, что в нашей стране большую распространенность получили районные
Ethernet сети, затягивающие в квартиру витую пару. Когда дома всего один
ком ...
Расчет установившихся режимов линейных электрических цепей
Данная работа представляет собой обобщение работы, проведенной за время
обучения теоретических основ электротехники. Фактически всю работу можно
разделить н ...
Проектирование волоконно-оптических линий связи
Волоконно-оптические линии связи (ВОЛС) в настоящее
время занимают заметное место в системах передачи информации как
общегражданского, так и специализирован ...