Разделы сайта
- Главная
- Электроника: интересно и познавательно
- Организация производства радиоэлектронной техники
- Телефонные переговоры по технологии IP-телефонии
- Информационно-компьютерная система службы видеонаблюдения
- Физические основы электроники
- Автоматические системы управления
- Цифровые устройства и приемники
Энергосбережение
Питание модуля измерения и передачи производится через бестрансформаторный блок питания от первого канала измеряемого напряжения. При падении напряжения на этом канале ниже уровня 90В модуль отключается.
Напряжение подается на конденсатор С1 и резистор R1, которые образуют реактивное сопротивление. Далее напряжение снимается на два диода (VD1, VD2), на которых происходит выпрямление питающего напряжения. Они образуют однополупериодный выпрямитель. Напряжение ограничивается по амплитуде стабилитроном VD3. Конденсатор C6 установлен для сглаживания пульсаций выпрямленного напряжения. Стабилизатор напряжения (кренка) DD1 используется для стабилизации питающего напряжения +5В микроконтроллера ATmega8.
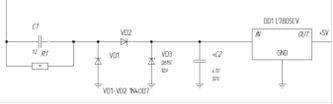
Рисунок 3.14 - Схема питания индикатора
Приложение
Листинг Программы
01./***Использование АЦП.***/
.
.#include <avr/io.h>
04.#include <avr/interrupt.h>
.#include <util/delay.h>
.
. // -0-1-2-3-4-5-6-7-8-9-dp
.char SEGMENTE[] = {0x3F, 0x06, 0x5B, 0x4F, 0x66, 0x6D, 0x7D, 0x07, 0x7F, 0x6F, 0x80};
.
.volatile unsigned char segcounter = 0;
.volatileint display = 0;
12.
. // Прерывание по переполнению T2, динамическая индикация
14.ISR (TIMER2_OVF_vect)
. {
.PORTD = 0xFF;
.PORTB = (1 <<segcounter);
.
.switch (segcounter)
. {
.case 0:
.PORTD = ~(SEGMENTE [display% 10000 / 1000]);
.break;
.case 1:
.PORTD = ~((SEGMENTE [display% 1000 / 100])|0x80); // добавляемдесятичнуюточку
.break;
.case 2:
.PORTD = ~(SEGMENTE [display% 100 / 10]);
.break;
.}
.if ((segcounter++) > 2) segcounter = 0;
.}
.
.volatile unsigned long value;
35.volatile unsigned intadc_counter;
.
./***Прерывание по окончанию преобразования АЦП***/
38.ISR (ADC_vect)
. {
.value = value + (ADC*11/4);
.adc_counter++;
.}
.
./***Главнаяфункция***/
.int main (void)
. {
.DDRD = 0xFF;
.DDRB = (1 << PB0)|(1 << PB1)|(1 << PB2)|(1 << PB3);
.PORTD = 0x00;
.PORTB = 0x00;
.DDRC = 0x00;
52.
.TIMSK |= (1 << TOIE2); // разрешение прерывания по таймеру2
.TCCR2 |= (1 << CS21); // предделитель на 8
.
.ADCSRA = (1 << ADEN) // разрешение АЦП
.|(1 << ADSC) // запуск преобразования
.|(1 << ADFR) // непрерывный режим работы АЦП
.|(1 << ADPS2)|(1 << ADPS1)|(0 << ADPS0) // предделитель на 64 (частота АЦП 125kHz)
.|(1 << ADIE); // разрешение прерывания
.
.ADMUX = (1 << REFS1)|(1 << REFS0) // внутренний ИОН 2,56V
.|(0 << MUX3)|(0 << MUX2)|(0 << MUX1)|(0 << MUX0); // вход ADC0
.
._delay_ms(50);
.
.sei(); // глобально разрешаем прерывания
.
.while(1)
. {
.if (adc_counter> 300) // вычисляем среднее значение АЦП
72. {
.display = value/adc_counter;
.adc_counter = 0;
75.value = 0;
.}
._delay_ms(50);
.}
.}
Исходный код для индикатора с общим катодом
./***Использование АЦП. Цифровой вольтметр***/
.
.#include <avr/io.h>
04.#include <avr/interrupt.h>
.#include <util/delay.h>
Интересное из раздела
Проект системы видеонаблюдения для малых предприятий на базе OOO Лоцман-БТ
В наши дни системы видеонаблюдения выделились в самостоятельную область
средств охраны, имеющую собственные правила и особенности эксплуатации. Системы
виде ...
Анализ и синтез линейной системы автоматического управления
Анализ
системы автоматического управления
Исходные
данные:
Рассмотрим
структурную схему III
изображенную в табл. П-1.1.
Параметры
...
Исследование входных цепей радиоприемников
Цель
работы: Закрепление теоретических знаний и
экспериментальное исследование входных цепей при емкостной, индуктивной и
смешанной связи с ненастрое ...