Разделы сайта
- Главная
- Электроника: интересно и познавательно
- Организация производства радиоэлектронной техники
- Телефонные переговоры по технологии IP-телефонии
- Информационно-компьютерная система службы видеонаблюдения
- Физические основы электроники
- Автоматические системы управления
- Цифровые устройства и приемники
Определить величину ошибки установившегося режима от задающего воздействия с помощью коэффициентов ошибок
Коэффициенты ошибок
Метод может применяться как для управляющего, так и для возмущающих воздействий. В конкретном случае необходимо использовать передаточную функцию по соответствующему воздействию. Поэтому ограничимся только случаем управляющего воздействия.
Если функция времени ![]() имеет произвольную форму, но достаточно плавную, так что вдали от начальной точки существенное значение имеет только конечное число
имеет произвольную форму, но достаточно плавную, так что вдали от начальной точки существенное значение имеет только конечное число ![]() производных
производных ![]() ;
; ![]() ;…;
;…; ![]() , то ошибку системы можно определить следующим образом. Пусть
, то ошибку системы можно определить следующим образом. Пусть
 . (2.8.3)
. (2.8.3)
Разложим передаточную функцию по ошибке ![]() в ряд Тейлора (по возрастающим степеням комплексной величины
в ряд Тейлора (по возрастающим степеням комплексной величины![]() ) в окрестности
) в окрестности ![]() . Тогда
. Тогда
![]() . (2.8.4)
. (2.8.4)
Степенной ряд сходится при малых значениях![]() , т.е. при достаточно больших значениях времени
, т.е. при достаточно больших значениях времени ![]() , что согласно теореме о конечном значении оригинала соответствует установившемуся режиму. Коэффициенты ряда Тейлора можно определить по формуле
, что согласно теореме о конечном значении оригинала соответствует установившемуся режиму. Коэффициенты ряда Тейлора можно определить по формуле
 . (2.8.5)
. (2.8.5)
Переходя от (2.8.4) к оригиналу, получаем формулу для установившейся ошибки  . (2.8.6)
. (2.8.6)
Таким образом, ошибка установившегося режима выражена через входной сигнал и его производные, а также через коэффициенты ![]() , которые в связи с этим называются коэффициентами ошибок
, которые в связи с этим называются коэффициентами ошибок
.
Так как передаточная функция по ошибке представляет собой дробно-рациональную функцию, то производные для (2.8.4) вычислять сложно и коэффициенты ошибок более просто получить делением числителя на знаменатель младшими степенями вперед и сравнением получающегося ряда с выражением в (2.8.3).
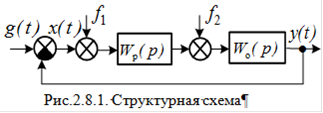
Пример2.8.2
. Найти ошибку установившегося режима от команды для системы рис.2.8.1, у которой  .
.
Имеем передаточную функцию для ошибки
 .
.
Делим числитель на знаменатель, начиная с младших степеней переменной ![]() :
:
Теперь сравниваем результат деления с рядом в общем виде. В результате деления нет свободного члена и поэтому ![]() .
.
Имеем также ![]() ;
;  и т.д.
и т.д.
Пусть ![]() . Тогда по (2.7.4) найдем
. Тогда по (2.7.4) найдем ![]()
Пусть ![]() , т.е. команда изменяется по линейному закону (с постоянной скоростью). Тогда по (2.8.4) найдем
, т.е. команда изменяется по линейному закону (с постоянной скоростью). Тогда по (2.8.4) найдем ![]()
Порядок астатизма системы
Обобщая предыдущий пример, можно заметить, что в системе с астатизмом порядка
![]() первые
первые ![]() коэффициентов ошибок
коэффициентов ошибок ![]() равны нулю. Если сигнал является полиномом степени
равны нулю. Если сигнал является полиномом степени ![]() , то первые
, то первые ![]() слагаемых в (2.8.6) обращаются в нуль за счет нулевых коэффициентов ошибок, а следующие - за счет нулевых производных. Если сигнал представляет собой полином степени
слагаемых в (2.8.6) обращаются в нуль за счет нулевых коэффициентов ошибок, а следующие - за счет нулевых производных. Если сигнал представляет собой полином степени ![]() , то (
, то (![]() )-е слагаемое не равно нулю.
)-е слагаемое не равно нулю.
В последнем примере имели систему с астатизмом первого порядка. В случае сигнала - полинома нулевой степени (константа) ошибка была равна нулю. В случае сигнала - полинома первой степени ошибка не равна нулю.
Не трудно заметить, что порядок астатизма связан с количеством интегрирующих звеньев в системе. Если бы их было ![]() , то младший член числителя передаточной функции по ошибке содержал бы
, то младший член числителя передаточной функции по ошибке содержал бы ![]() и при делении числителя передаточной функции на знаменатель младший член результата также содержал
и при делении числителя передаточной функции на знаменатель младший член результата также содержал
Интересное из раздела
Прибор для мониторинга напряжения питающей сети
устройство электронный измерительный индикация
С
уровнем развития энергетики часто связывают состояние промышленного
производства, уровень жизни населения и ...
Cинтез инвертирующего усилителя
Операционные усилители в настоящее время находят широкое применение при
разработке различных аналоговых и импульсных электронных устройств. Это связано
с те ...
Моделирование цифро-аналоговых преобразователей
С введением новых телевизионных стандартов, таких как EDTV (телевидение повышенной четкости) и HDTV(телевидение высокой четкости) повышаются требования к АЦП и ЦАП. Некот ...