Разделы сайта
- Главная
- Электроника: интересно и познавательно
- Организация производства радиоэлектронной техники
- Телефонные переговоры по технологии IP-телефонии
- Информационно-компьютерная система службы видеонаблюдения
- Физические основы электроники
- Автоматические системы управления
- Цифровые устройства и приемники
Алгоритмы функционирования САУ (САР) и их функциональные элементы
По алгоритму функционирования САУ подразделяются на стабилизирующие, программные, следящие, экстремальные.
Стабилизирующие системы предназначены для поддержания заданного значения регулируемой величины с требуемой точностью регулирования при неизменном задающем воздействие (входной сигнал). Назначение управляемой величины предусмотренное алгоритмом функционирования, называется предписанным (заданным), а измеренное значение этой величины называется действительным (фактическим). Отклонение управляемой величины от предельной величины обусловлены возмущающими воздействиями на объект управления со стороны внешней среды.
Алгоритм функционирования стабилизирующей системы описывается следующим выражением:
![]() ,
,
где У - управляющая величина,
С - постоянная, равная предписанному значению управляемой величины
![]() - отклонение управляемой величины в процессе функционирования системы от предписанного значения.
- отклонение управляемой величины в процессе функционирования системы от предписанного значения.
Если рассматривается установившейся режим работы САУ при постоянных внешних воздействиях, то ![]() представляет собой статистическую ошибку системы. Для оценки отклонения управляемой величины используются коэффициенты неравномерности
представляет собой статистическую ошибку системы. Для оценки отклонения управляемой величины используются коэффициенты неравномерности ![]() и статизма
и статизма![]() определяются:
определяются:
![]() ,
,
где Уmax, Уmin - значения управляемой величины;
Уn - номинальное значение управляемой величины ![]() определяется по зависимости:
определяется по зависимости:
![]() ,
,
где Zн - номинальное значение нагрузки на систему.
Примером стабилизирующей системы является поплавковая камера карбюратора (рисунок 2.1)
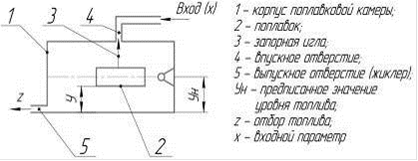
Рисунок 2.1 - Поплавковая камера карбюратора
Программные системы автоматического регулирования изменяют управляемую величину по определенной заранее заданной программе. Эта программа представляет собой алгоритм функционирования автоматизированной системы используется для построения алгоритма управления. Реализация данной задачи достигается путем использования задатчиков (задающих устройств) генерирующих управление воздействия. Процессы функционирования систем записываются следующими алгоритмами:
временные У = f (t); t - время;
пространственные У = f (x, y, z). x, y, z - координаты пространства.
По пространственному принципу работают копировальные станки и автоматы. Одна из схем приведена на рисунке 2.2
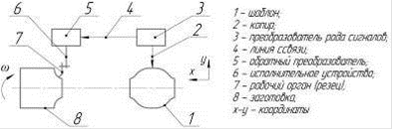
Рисунок 2.2 - Копировальный станок
Следящая система - это такая система, у которой управляемая величина У измеряется в соответствии с задающим воздействием x (t). Эти системы могут быть построены на основе любого функционального принципа управления. От программной, она отличается тем, что вместо датчика программы используется устройство слежения за изменением некоторого внешнего фактора, задающего воздействие.
Алгоритм функционирования следящей системы можно записать следующим образом:
У = x (t).
Примером следящей системы может являться регулятор тормозных сил автомобиля с пневмоприводом тормозов (рисунок 2.3).
Интересное из раздела
Расчет системы электропитания и ее элементов
Цель
работы: составить по заданным условиям задания один из вариантов системы
электропитания с расчетом и выбором ее элементов.
Электропитание
любой сис ...
Анализ и синтез САУ методом корневого годографа
- Изучение системы автоматического регулирования (САР).
- Оценка качеств, характеристик САР
(устойчивости, ошибки, переходного процесса) по различн ...
Функционально-структурный анализ системы автоматического управления (регулирования) технического объекта
Работа любого технологического объекта
характеризуется различными параметрами, которые изменяются в зависимости от
работы машины и воздействия внешних факто ...