Разделы сайта
- Главная
- Электроника: интересно и познавательно
- Организация производства радиоэлектронной техники
- Телефонные переговоры по технологии IP-телефонии
- Информационно-компьютерная система службы видеонаблюдения
- Физические основы электроники
- Автоматические системы управления
- Цифровые устройства и приемники
Моделирование ноги бедра и голени
Вывести формулы вычисления моментов инерции моделей тел изображённых на рисунке 3.1 относительно следующих осей :
) АА' - момент инерции бедра и момент инерции бедра с голенью;
) ВВ' - момент инерции голени.
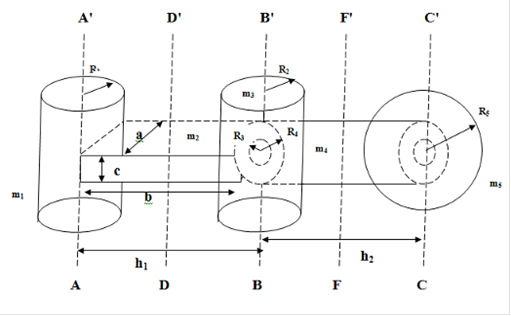
Рисунок 3.1
) Момент инерции сплошного цилиндра относительно оси АА':
J1 АА'= ![]()
![]() m1R21
m1R21
Момент инерции параллелепипеда относительно оси DD':
J2 DD'= ![]()
![]() m2(a2+b2)
m2(a2+b2)
Момент инерции параллелепипеда приведённый к оси АА':
J2 АА'= J2 DD'+ m2![]()
![]()
Момент инерции бедра относительно оси АА':
J АА'= J1 АА'+ J2 АА' = ![]()
![]() m1R21+ J2 DD'+ m2
m1R21+ J2 DD'+ m2![]()
![]()
1) Момент инерции сплошного цилиндра относительно оси ВВ':
J3 BB'= ![]()
![]() m3R22
m3R22
Момент инерции полого цилиндра относительно оси FF':
J4 FF'= ![]()
![]() m4 (3R24 - 3R23+h22)
m4 (3R24 - 3R23+h22)
Момент инерции полого цилиндра приведённый к оси ВВ':
J4 BB'= J4 FF' + m4![]()
![]()
Момент инерции шара относительно оси СС':
J5 СС'= ![]()
![]() m5R25
m5R25
Момент инерции полого цилиндра приведённый к оси ВВ':
J5 BB'= J5 СС'+m5h22
Момент инерции голени относительно оси ВВ’:
J BB'= J3 BB'+ J4 BB'+ J5 BB'= ![]()
![]() m3R22+ J4 FF' + m4
m3R22+ J4 FF' + m4![]()
![]() + J5 СС'+m5h223)Момент инерции ноги относительно оси АА':
+ J5 СС'+m5h223)Момент инерции ноги относительно оси АА':
J1 АА'+ J2 АА'
Приведём сплошной цилиндр (тело 3) к оси АА':
J3 АА'= J3 BB'+ m3h21
Приведём полый цилиндр (тело 4) к оси АА':
J4 АА'= J4 FF'+ m4![]()
![]()
Приведём шар (тело 5) к оси АА':
J5 АА'= J5СС'+ m5![]()
![]() 2
2
Момент инерции всей ноги:
Jноги= J1 АА'+ J2 АА'+ J3 АА'+ J4 АА'+ J5 АА'=![]()
![]() m1R21+ J2 DD'+ m2
m1R21+ J2 DD'+ m2![]()
![]() + J3 BB'+ m3h21+ J4 FF'+ m4
+ J3 BB'+ m3h21+ J4 FF'+ m4![]()
![]() + J5СС'+ m5
+ J5СС'+ m5![]()
![]() 2 =
2 = ![]()
![]() m1R21 +
m1R21 + ![]()
![]() m2(a2+b2) + m2
m2(a2+b2) + m2![]()
![]() +
+![]()
![]() m3R22+ m3h21 +
m3R22+ m3h21 +![]()
![]() m4 (3R24 - 3R23+h22) + m4
m4 (3R24 - 3R23+h22) + m4![]()
![]() +
+![]()
![]() m5R25 + m5
m5R25 + m5![]()
![]() 2
2
Интересное из раздела
Проектирование волоконно-оптических линий передач между городами Мелитополь-Луганск
Волоконно-оптические линии передачи (ВОЛП) на сегодняшнее время
переживает расцвет, связанный, в первую очередь с взрывным характером развития
в последние годы ...
Анализ алгоритмов цифровой обработки сигналов. Исследование корректирующих способностей циклических кодов
цифровой сигнал циклический код
Цифровой фильтр - в электронике любой фильтр, обрабатывающий цифровой сигнал с целью выделения и/или подавления определённых частот этого ...
Проектирование двухполупериодного выпрямителя и Г-образного индуктивно-емкостного фильтра
Электроника
это наука, которая охватывает не только технику слабых токов, но технику
сильных токов, обычно относящихся к электротехнике, поскольку она опер ...