Разделы сайта
- Главная
- Электроника: интересно и познавательно
- Организация производства радиоэлектронной техники
- Телефонные переговоры по технологии IP-телефонии
- Информационно-компьютерная система службы видеонаблюдения
- Физические основы электроники
- Автоматические системы управления
- Цифровые устройства и приемники
Нахождение основной матрицы типа а и системной функции исследуемого четырехполюсника
Матрица А имеет вид:
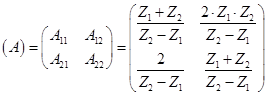 . (3.1)
. (3.1)
Подставляем значения сопротивлений ДП в матрицу А получим:
 . (3.2)
. (3.2)
Проверим правильность расчёта А-матрицы по формуле:
![]() . (3.3)
. (3.3)

Следовательно, формулы (3.2) верны.
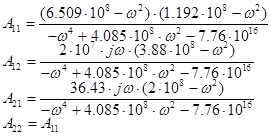
Рассчитаем коэффициенты А на контрольной частоте ![]() .
.
![]()
Определитель матрицы А равен 1, что свидетельствует о пассивности ЧП.
Матрица А примет окончательный вид:
 . (3.4)
. (3.4)
Зависимость А-параметров от частоты приведена в таблице 3.1.
Таблица 3.1 - Зависимость А-параметров от частоты
|
ω.cˉ¹ |
ƒ.Гц |
A11=А22 |
А12 |
А21 |
|
0 |
0 |
-1 |
0 |
0 |
|
1000 |
159 |
-0.998 |
-j100.27 |
|
|
5000 |
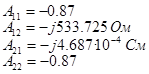
796 |
-0.87 |
-j533.725 |
|
|
10000 |
1592 |
-0.23 |
-j1232 |
|
|
10917.9 |
1738 |
0 |
-j1361 |
|
|
11000 |
1751 |
0.019 |
-j1372 |
|
|
14000 |
2228 |
0.968 |
-j1495 |
|
|
14142.1 |
2251 |
1 |
-j1481 |
0 |
|
15000 |
2387 |
1.237 |
-j1347 |
|
|
19000 |
3024 |
1.158 |
-j169.7 |
|
|
19697.7 |
3135 |
1 |
0 |
|
|
20000 |
3183 |
0.948 |
j64.69 |
|
|
25000 |
3979 |
0.061 |
j556.567 |
|
|
25512.7 |
4060 |
0 |
j569.916 |
|
|
26000 |
4138 |
-0.054 |
j579.5 |
|
|
50000 |
7958 |
-0.83 |
j398 |
|
|
¥ |
¥ |
-1 |
0 |
0 |
Интересное из раздела
Программируемый генератор сигналов
Современное состояние и перспективы развития многих отраслей техники, в
том числе и радиоэлектроники, во многом определяются широким проникновением
средств ...
Проектирование железнодорожного узла связи на основе цифровой АТС Квант-Е
Цифровая система коммутации «Квант-Е» имеет модульное построение,
распределенную коммутацию, децентрализованное программное управление и
возможность централ ...
Анализ и синтез линейной системы автоматического управления
Анализ
системы автоматического управления
Исходные
данные:
Рассмотрим
структурную схему III
изображенную в табл. П-1.1.
Параметры
...