Разделы сайта
- Главная
- Электроника: интересно и познавательно
- Организация производства радиоэлектронной техники
- Телефонные переговоры по технологии IP-телефонии
- Информационно-компьютерная система службы видеонаблюдения
- Физические основы электроники
- Автоматические системы управления
- Цифровые устройства и приемники
Главный двигатель как динамическое звено
Схема компоновки пропульсивного энергетического комплекса судна, представленная на рис. 1 получила наибольшее распространение в мире. В качестве главного приводного двигателя в этой схеме используется один малооборотный двигатель с прямой передачей мощности на гребной винт фиксированного шага (ВФШ). Вывод уравнения динамики двигателя приводится именно для такого варианта компоновки главной силовой установки судна.
Главный судовой двигатель как объект (ОР) регулирования частоты вращения вала представлен на рис. 2 в виде звена с входными и выходными параметрами. За выходной параметр принята частота вращения n, т.е. число оборотов вала двигателя в минуту. Входными параметрами будем считать:
внешнее возмущающее воздействие с как фактор условий работы судна, определяющих степень нагружаемости ГД со стороны потребителя мощности;
регулирующее воздействие h в виде индекса положения рабочего органа, определяющего цикловую подачу топлива в цилиндры дизеля.
Уравнением динамики главного двигателя назовём уравнение, связывающее его входные и выходные параметры и описывающее поведение двигателя в переходных процессах.
В отношении рассматриваемого объекта возьмём основное уравнение динамики вращательного движения:
![]() ; (1)
; (1)
где J - приведённый к оси вращения момент инерции двигателя и всех, связанных с его валом масс, включая присоединённые к гребному винту массы воды, кг м2;
![]() - угловая скорость вращения вала двигателя, с-1;
- угловая скорость вращения вала двигателя, с-1;
М - результирующий момент всех действующих на его валу сил, Н м.
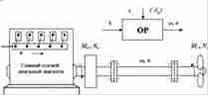
Рис. 1.2 Принципиальная схема пропульсивной энергетической установки судна и функциональное представление главного дизельного двигателя как объекта регулирования частоты вращения вала
Поскольку на практике в эксплуатации флота контроль частоты вращения главных двигателей принято осуществлять в количестве оборотов за минуту, поэтому целесообразно в уравнении (1) угловую скорость ![]() выразить через число оборотов n, воспользовавшись соотношением
выразить через число оборотов n, воспользовавшись соотношением
![]() (2)
(2)
где n - частота вращения вала двигателя, мин-1.
Вместе с этим, результирующий момент М определим наиболее простым образом как алгебраическую сумму эффективного момента Ме, развиваемого двигателем, и момента сил сопротивления Мс, т.е. потребителя механической энергии, которые действуют на корпус и воспринимаются гребным винтом при движении судна.
Тогда уравнение динамики (1) ГД представим так:
![]() ; (3)
; (3)
где моменты Ме и Мс определены как неявные функции соответствующих фазовых переменных, т.е. входных и выходной координат объекта регулирования, согласно его функциональной схемы (рис.1).
Использование уравнения (3) в исследованиях либо при моделировании динамических процессов требует аналитического представления функциональных зависимостей для моментов Me(n,h) и Mc(n,c). Эти зависимости определяются эмпирически и такого рода эмпирические модели функций всегда нелинейны по отношению к определяющим их аргументам. Следовательно, уравнение (3) изначально является нелинейным дифференциальным уравнением.
При линеаризации нелинейных функций производится подмена нелинейных функций их некоторыми линейными эквивалентами от их аргументов, справедливыми для описания поведения рассматриваемого элемента лишь в достаточной близости относительно некоторого заданного установившегося режима работы.
Всем параметрам, относящимся к какому-либо конкретно рассматриваемому установившемуся режиму работы двигателя, будем присваивать индекс «0». В таком случае текущие значения фазовых координат объекта регулирования могут быть представлены в приращениях как
Интересное из раздела
Анализ сигналов в радиотехнических цепях
Теоретическая
часть должна включать:
расчеты
спектральной плотности, амплитудного и фазового спектров сигнала и его
автокорреляционной фун ...
Микроэлектроника. Новая быстро развивающаяся технология
Электроника
прошла несколько этапов развития, за время которых сменилось несколько
поколений элементной базы: дискретная электроника электровакуумных прибор ...
Проектирование и программная реализация комплексной системы стрелочных переводов
Цифровая обработка сигналов (ЦОС) [1] представляет собой одну из наиболее
мощных технологий, которая в XXI веке будет определять развитие наук ...