Разделы сайта
- Главная
- Электроника: интересно и познавательно
- Организация производства радиоэлектронной техники
- Телефонные переговоры по технологии IP-телефонии
- Информационно-компьютерная система службы видеонаблюдения
- Физические основы электроники
- Автоматические системы управления
- Цифровые устройства и приемники
Описание алгоритма работы манипулятора
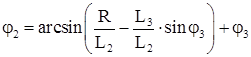
На рис.1. представлен состав механической части манипулятора грунтозаборного устройства программы «Фобос-Грунт».
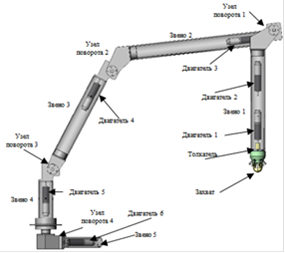
Рис.1. Состав манипулятора грунтозаборного устройства
На рис.2. показано исходное положение манипулятора, в котором он находится после разарретирования (расчековки). Плоскость всех элементов манипулятора yz в этом положении совпадает с плоскостью передней панели посадочного модуля.
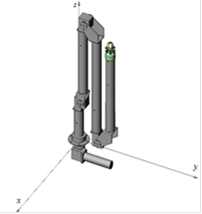
Рис.2. Исходное положение манипулятора
Перемещение захвата в контрольную точку с координатами xyz производится в следующей последовательности:
1. Манипулятор разворачивается на угол, определяемый координатами заданной точки ![]() , занимая положение, показанное на рис.3 и 4.
, занимая положение, показанное на рис.3 и 4.
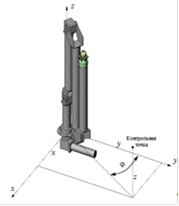
Рис.3. Положение манипулятора после поворота на угол ![]()
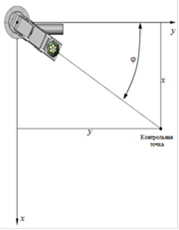
Рис.4. Положение манипулятора после поворота на угол ![]() , вид сверху
, вид сверху
Далее последовательно разворачиваются звенья 2, 1 и 3 соответственно на углы, определяемые равенствами:

![]()
где ![]() ,
, ![]() ,
, ![]() , zk = 1 см,
, zk = 1 см,
L1, L2 и L3 - соответственно длины звеньев 1, 2 и 3,
z0 - координата по оси z места установки манипулятора,
x, y и z - координаты контрольной точки.
После поворота на угол 2 манипулятор принимает положение показанное на рис.5.

Рис.5. Положение манипулятора после поворота звена 2
Следующим поворотом звено 1 разворачивается на угол 1, определяемый равенством (1), при этом манипулятор принимает положение показанное на рис.6.
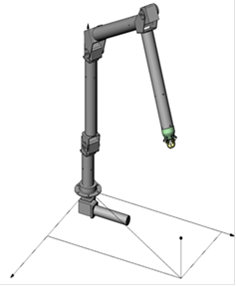
Рис.6. Положение манипулятора после поворотазвена 1
Последним движением манипулятор разворотом звена 3 на угол, определяемый равенством (1) переводится в положение, показанное на рис.7.
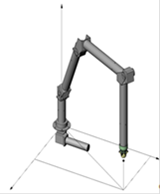
Рис.7. Положение манипулятора послеповорота звена 3
По окончании этого разворота узел захвата манипулятора выходит в точку, отстоящую от контрольной точки по координате z на величину 1 см.
Далее, производится изменение режима движения манипулятора на точный и поворотами звена 3 (при необходимости может дополнительно поворачиваться звено 1) узел захвата перемещается в контрольную точку до срабатывания датчика усилия контакта (микропереключателя) контролирующего усилие контакта до 100 Г. После срабатывания микропереключателя лепестки захвата раздвигаются, как показано на рис.8 и дальнейшее движение узла захвата производится с усилием до 100 Г (обеспечивается движением звена 3 и датчиком усилия контакта) и одновременным сведением (сжатием) лепестков захвата.
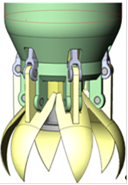
Рис.8. Лепестки захвата раскрыты
Интересное из раздела
Использование специализированных микропроцессоров
Рассмотрим
преимущества цифровой обработки сигналов (ЦОС) на сравнении аналоговых и
цифровых фильтров. Цифровые фильтры всё чаще находят своё применение в м ...
Программируемый генератор сигналов
Современное состояние и перспективы развития многих отраслей техники, в
том числе и радиоэлектроники, во многом определяются широким проникновением
средств ...
Оборудование аудио и видео
Сейчас
весь мир пользуется множеством различных устройств, в разных сферах индустрии.
Прогресс не стоит на месте, каждый год, месяц появляются различны ...