Разделы сайта
- Главная
- Электроника: интересно и познавательно
- Организация производства радиоэлектронной техники
- Телефонные переговоры по технологии IP-телефонии
- Информационно-компьютерная система службы видеонаблюдения
- Физические основы электроники
- Автоматические системы управления
- Цифровые устройства и приемники
Шагающий аппарат
Одной из важных разновидностей роботов являются шагающие роботы, предназначенные для перемещения по труднопроходимой местности. В отличие от колесных и гусеничных машин, шагающий аппарат при движении использует для опоры лишь некоторые участки поверхности. Поэтому он существенно меньше повреждает почвенный покров, что может оказаться важным для экологии некоторых районов (например, тундры). Однако указанные преимущества шагающего аппарата определяют его высокую сложность и большое энергопотребление. Аппарат имеет большое число управляемых степеней свободы, т.е. количество углов, определяющих положения звеньев всех ног. А это приводит к сложным конструкциям, использованию высокоэффективных приводов, специальному строению стоп, рассеивающих энергию удара, и т.д. Система управления должна обеспечить обработку информации о местности, принятие решений о характере движения, контроль за их выполнением. Именно создание системы управления аппаратом − центральная проблема шагающего робота. Существующие виды приводов по своим качествам все еще уступают двигательным аппаратам животных и человека.
Для одного из первых в мире шагающих аппаратов, созданных в Институте механики МГУ в 70-е годы прошлого столетия, была выбрана схема «шестиножки» (рис.1).
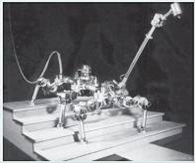
Рисунок 1
В качестве биологического аналога робота использовался рыжий таракан (пруссак). Ноги таракана − это универсальный биологический объект изучения для создания шагающей машины. Бег таракана можно проследить с помощью кинокамеры. Для этого таракана помещают в стеклянную пробирку и, закрепив ее, снимают бегающего таракана кинокамерой. Основным типом походки таракана является походка 3 − 3 (трешками). Он идет так, что всегда опирается на три ноги, образующие опорный треугольник, внутри которого располагается центр тяжести его тела. Это существенно облегчает проблему устойчивости, так как опор аппарата на три ноги оказывается устойчивым.
Каждая конечность робота имеет три степени свободы и приводится в движение с помощью трех двигателей с редукторами. На конечностях установлены позиционные датчики, измеряющие углы поворота звеньев ноги друг относительно друга. Система управления двигателями шагающего аппарата построена по иерархическому принципу. Она создает управляющие сигналы, обеспечивающие движение аппарата с автоматической приспосабливаемостью к малым неровностям поверхности по командам оператора (или верхнего уровня), задающего основные характеристики ходьбы и движения корпуса аппарата (например, ходьба вперед, назад, вбок, разворот на месте и т.п.).
После появления «шестиножки» в Институте механики МГУ, которая получила имя «МаШа» (МАшина ШАгающая), началось своего рода соревнование между США и СССР, что было нормально для того времени. В ответ на «МаШу» американцы предложили свою версию шестиногого робота. Позже стали появляться и другие шестиногие роботы, например построенные в Германии.
«МаШа» содержала много пионерских научных решений, опередивших свое время, и дала начало созданию умных роботов с иерархической системой управления. Она может действовать самостоятельно, выбирая себе путь по пересеченной местности. Оказалось, что без информации о силах и моментах сил, возникающих между ногами и подстилающей поверхностью, организовать «гладкое» управление ходьбой практически невозможно. С этой целью была разработана система так называемых тактильных датчиков, которые снимают информацию о возникающих силах и посылают ее в систему управления робота. Только благодаря этому можно организовать плавное, а не толчками, движение робота.
Американцы официально объявили, что к 2050 году в их действующих войсках не будет людей. В 2005 году в США был создан четырехногий робот «БигДог» (Большая собака) (рис.2).

Рисунок 2
Этот робот может ходить, бегать и прыгать, преодолевать пересеченную местность, он прекрасно перемещается и по снегу, и по камням, и по грязи. За счет хорошо организованной системы управления он очень устойчив: если его толкнуть, то он, подобно человеку или животному, переставит ноги и не упадет. Энергию роботу дает бензиновый мотор, приводящий в действие гидравлическую систему. Ноги робота в точности скопированы с конечностей животных. В их конструкцию включены амортизаторы, гасящие энергию удара. Длина робота 1 м, рост 70 см, вес 75 кг, что соответствует размерам крупной собаки.
Робот снабжен бортовым компьютером, управляющим передвижением в соответствии с окружающей обстановкой. Многочисленные датчики позволяют оператору робота отслеживать его местоположение, расположение своих и вражеских сил, контролировать состояние бортовых систем робота. «Киберсобака», которая будет «служить» в морской пехоте США, может идти со скоростью 5 км/ч и преодолевать подъемы и спуски до 35°. Она может нести вооружение или иной полезный груз общей массой свыше 40 кг.
Не менее богатую историю, по сравнению с другими шагающими механизмами, имеют и двуногие машины. Так, в 1972 году в Институте механики МГУ разработали модель робота, которая получила имя «Рикша». В движение она приводилась с помощью двух ног и одновременно имела еще и два колеса сзади (отсюда и произошло название робота). Но главной задачей было создание человекоподобного (антропоморфного) робота. Основная проблема и сложность управления двуногой ходьбой заключается в необходимости придания устойчивости неустойчивой конфигурации, которая при выключенном управлении не может быть реализована. Например, «выключение» вестибулярного аппарата человека даже на одну секунду приводит к его падению.
В 1976 − 82 годах в Институте механики МГУ исследовали механико-математическую модель двуногого робота, представляющего собой плоский пятизвенный механизм, который состоит из корпуса и двух идентичных двухзвенных ног. Ходьба аппарата, как и человека, представляет собой последовательность чередующихся одноопорной и двухопорной фаз. В одноопорной фазе аппарат опирается на одну ногу (опорную), другая нога при этом переносится. В двухопорной фазе он опирается на обе ноги. Одноопорное движение считается баллистическим (пассивным), т.е. это движение происходит по инерции. На аппарат действуют только сила тяжести и, разумеется, силы реакции опоры. А вот приложение каких-либо активных воздействий (моментов сил) в шарнирах («суставах») механизма происходит в двухопорной фазе. При ходьбе человека фаза двойной опоры занимает примерно 20 % времени всего шагового цикла, в рассмотренной же модели робота двухопорная фаза считается мгновенной. В 1990-х годах были сконструированы два макета двуногого шагающего робота: один с двумя телескопическими ногами, другой − антропоморфный (рис.3)

Рисунок .3
и разработаны алгоритмы управления ими на основе предложенного метода баллистического управления ходьбой.
Японцы объявили, что к 2050 году они намерены создать команду полностью самостоятельных человекоподобных роботов, способную выиграть у чемпиона мира по футболу среди людей.
- Описание шагающего аппарата
- Разметка шагающего аппарата
- Моделирование ноги бедра и голени
- Вычисление моментов инерции бедра, голени и ноги в целом
- Вычисление параметров ЭД для поворота ноги при помощи привода бедра
Интересное из раздела
Анализ и синтез САУ методом корневого годографа
- Изучение системы автоматического регулирования (САР).
- Оценка качеств, характеристик САР
(устойчивости, ошибки, переходного процесса) по различн ...
Метрологические характеристики уровнемеров
Многообразие применяемых типов измерительных
преобразователей, повышение требований к точности и надежности работы систем
приводят к необходимости использов ...
Расчет характеристик сигналов и каналов связи
В последнее десятилетие ХХ века произошла научно-техническая революция в
области транспортной связи, в основе которой лежат два крупных достижения ...