Разделы сайта
- Главная
- Электроника: интересно и познавательно
- Организация производства радиоэлектронной техники
- Телефонные переговоры по технологии IP-телефонии
- Информационно-компьютерная система службы видеонаблюдения
- Физические основы электроники
- Автоматические системы управления
- Цифровые устройства и приемники
Вычисление моментов инерции бедра, голени и ноги в целом
Сумма моментов инерционных, гравитационных и движущих сил для шарнирной ЭМС, приведенной к k-му телу, вычисляется по формуле:
 (1)
(1)
где используются постоянные величины:
![]()
mk - масса k-ой подсистемы;
dk=OkCdk - расстояние от оси вращения k-го тела до центра масс k-го дополненного тела;
Ri=Oi-1Oi - расстояние от оси вращения базы i-го тела до оси вращения i-го тела;
Jk - момент инерции k-го дополненного тела относительно оси вращения k-го тела.
Остальные величины меняются с течением времени и вычисляются по формулам:
![]()
где ![]() - проекции ускорения, перемещения оси вращения первого тела на оси абсолютной системы координат;
- проекции ускорения, перемещения оси вращения первого тела на оси абсолютной системы координат;
![]() ;
;
![]() ;
;
![]() ;
;
![]() - угол, откладываемый от вектора ускорения свободного падения до оси
- угол, откладываемый от вектора ускорения свободного падения до оси ![]()
![]() .
.
Мk - момент движущей силы, развиваемый приводом k-го тела;
Мi - момент движущей силы, развиваемый приводом i-го тела.
Под k-ым дополненным телом понимают k-е тело, для которого в шарнирные точки смежных тел мысленно помещены массы несомых тел.
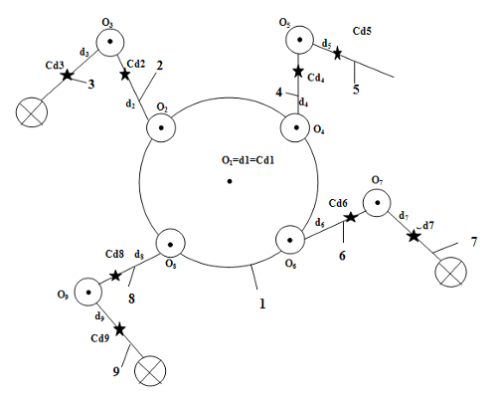
Рисунок 4.1- Шагающий аппарат
1) Выпишем формулу (1) для k =1:
![]()
По определению: md1=m1d1
Так как d1=0, отсюда md1= m10=0
По определению:
![]()
![]()
![]()
![]()
По определению:
mg1Sg1=gm1d1=0, т. к. d1=0
Корпус привода не имеет, поэтому М1=0.
По определению:
J22=m2d2R2 т.к. d2=O2Cd2 > 0; R2=O1O2 > 0;
![]()
По определению:
J32=m3d3R2 т.к. d3=O3Cd3 > 0;
![]()
По определению:
J44=m4d4R4 т.к. d4=O4Cd4 > 0; R4=O1O4 > 0;
![]()
По определению:
J54=m5d5R4 т.к. d5=O5Cd5 > 0; R4=O1O4 > 0;
![]()
По определению:
J66=m6d6R6 т.к. d6=O6Cd6 > 0; R6=O1O6 > 0;
![]()
По определению:
J76=m7d7R6 т.к. d7=O7Cd7 > 0; R6=O1O6 > 0;
![]()
По определению:
J88=m8d8R8 т.к. d8=O8Cd8 > 0; R8=O1O8 > 0;
![]()
По определению:
J98=m9d9R8 т.к. d9=O9Cd9 > 0; R8=O1O8 > 0;
![]()
Таким образом итоговая формула для k=1 будет выглядеть следующим образом:

) Выпишем формулу (1) для k =2:
![]()
По определению:
md2=m2d2>0 , т.к. d2=O2Cd2>0;
![]()
По определению:
J22=m2d2R2>0 , т.к. d2= O2Cd2>0, R2=O1O2>0;
![]()
По определению:
J33=m3d3R3>0 , т.к. d3=O3Cd3>0, R3=O2O3>0;
![]()
Интересное из раздела
Моделирование цифро-аналоговых преобразователей
С введением новых телевизионных стандартов, таких как EDTV (телевидение повышенной четкости) и HDTV(телевидение высокой четкости) повышаются требования к АЦП и ЦАП. Некот ...
Источник питания охранного устройства
В настоящее время существует множество систем, предназначенных для
осуществления охраны и безопасности объектов. С развитием науки и техники
у ...
Проводные линии электросвязи
Проводные
линии электросвязи делятся на кабельные, воздушные и оптоволоконные.
Линии
электросвязи возникли одновременно с появлением электрического теле ...