Разделы сайта
- Главная
- Электроника: интересно и познавательно
- Организация производства радиоэлектронной техники
- Телефонные переговоры по технологии IP-телефонии
- Информационно-компьютерная система службы видеонаблюдения
- Физические основы электроники
- Автоматические системы управления
- Цифровые устройства и приемники
Разработка схемы блока питания
Общий потребляемый ток блока измерения температуры определяется простым суммированием токов потребления основных узлов. Основной составляющей суммарного тока потребления является генератор, потребляющий 45мА. Остальные узлы потребляют меньший ток. Зададимся условием, пусть блок питания обеспечивает выходной ток в 100мА.
Согласно техническому заданию блок измерения должен питаться непосредственно от сети переменного тока, поэтому в схему питания обязательно должны входить понижающий трансформатор, двухполупериодный диодный выпрямитель и стабилизаторы, формирующие постоянные уровни выходного напряжения +/-5 В. Выберем трансформатор ТПГ-2 - 2х6В. С выхода трансформатора напряжение поступает на диодный мост, представляющий собой сборку W04M (1.5A, 400В). Данное схемотехническое решение эффективно, т.к. в каждом полупериоде входного сигнала используется обе половины вторичной обмотки трансформатора. Выбираем емкость накопительного электролитического конденсатора таким, чтобы его сопротивление на передаваемой частоте было мало. Данному требованию удовлетворяет емкость номиналом 100 мкФ (конденсаторы С1 и С2), в качестве которой выберем К50-35-16В-100 мкФ.
В качестве преобразователей выберем ИМС фирмы Fairchild LM7805 для получения напряжения в +5 В и LM7905 для получения напряжения в −5В. Оба преобразователя имеют диапазон входных напряжений до +/-35В, могут обеспечить выходной ток до 100 мА, что с запасом отвечает нашим требованиям. Внешние навесные элементы выбраны с учетом рекомендаций самого производителя микросхем. Поэтому выберем С3 К10-17б - 0,33 мкФ, С4 К10-17-0,33 мкФ, С5 К10-17б - 0,1 мкФ, С6 К10-17б -0,1 мкФ.
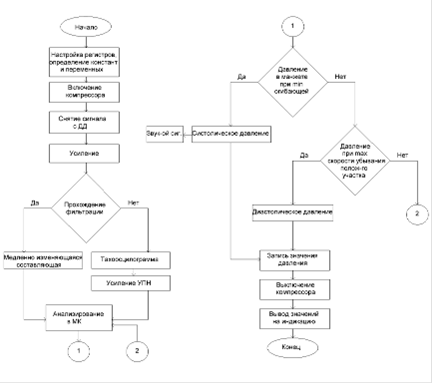
Алгоритм работы программы
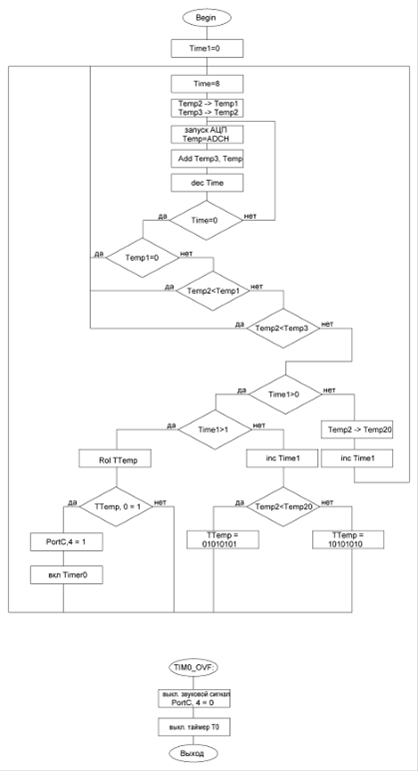
Алгоритм подпрограммы
Интересное из раздела
Проектирование и программная реализация комплексной системы стрелочных переводов
Цифровая обработка сигналов (ЦОС) [1] представляет собой одну из наиболее
мощных технологий, которая в XXI веке будет определять развитие наук ...
Определение параметров нелинейности усилителя аппаратуры ВЧ связи по ЛЭП на основе аппроксимации его коэффициента усиления и выбор оптимального режима
1. Аппроксимировать
полиномом седьмой степени экспериментальную зависимость коэффициента усиления
Кэ = f ( Uсм
) заданного усилительного каскада н ...
Шлюз ZigBee и GPRS
Беспроводные сенсорные сети получили большое развитие в
последнее время. Такие сети, состоящие из множества миниатюрных узлов,
оснащенных маломощным приемо- ...