Разделы сайта
- Главная
- Электроника: интересно и познавательно
- Организация производства радиоэлектронной техники
- Телефонные переговоры по технологии IP-телефонии
- Информационно-компьютерная система службы видеонаблюдения
- Физические основы электроники
- Автоматические системы управления
- Цифровые устройства и приемники
Синтез двухэлементного ДП Z1.
Учитывая, что p=jw, получим в классической форме записи функцию сопротивления ДП Z1(см. (1.1)):
1(p)= ![]() , (1.3)
, (1.3)
Заменяем оператор р на jw получаем:
Z1(jw)=![]() , (1.4)
, (1.4)
Рассчитаем нули функции Z1(p), приравняв числитель функции к нулю:
![]() = 0
= 0
Найдём корни уравнения:
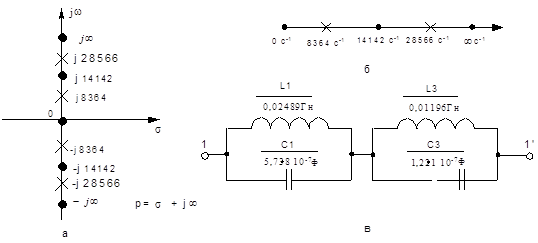
w01 = 0 с-1; w02 = 14142 с-1; w03 = -14142 с-1
Далее найдём полюсы:
![]() = 0
= 0
Найдём корни уравнения:
w¥1 = -8364 с-1; w¥2 = 8364 с-1; w¥3 = -28566 с-1; w¥4 = 28566 с-1.
Построим полюсно-нулевое изображение и характеристическую строку.
По выражению (1.3) видим, что ДП Z1(jw) класса «0 - 0» имеет два резонанса токов:
![]() ;
; ![]() .
.
Так же двухполюсник имеет один резонанс напряжений:
![]() .
.
Реализуем по схеме Фостера 1-го рода методом разложения на простые дроби:
![]() . (1.5)
. (1.5)
![]() = 1742627,
= 1742627,
![]() = 8257372.
= 8257372.
C1= ![]() = 1/1742627 = 5,738×10-7Ф.
= 1/1742627 = 5,738×10-7Ф.
Из условия резонанса:
![]() .
.
С3= ![]() = 1/8257372 = 12,11 мкФ.
= 1/8257372 = 12,11 мкФ.
Из условия резонанса:
![]() .
.
Частотная зависимость сопротивления ДП сведена в табл. 1.1. График частотной зависимости Z1 (w) представлен на рисунке 1.3.
Таблица 1.1. Частотная зависимость сопротивлений двухполюсника Z1
|
Угловая частота w, c-1 |
|
|
0 |
0 |
|
2.5e3 |
0+93.868i |
|
5e3 |
0+245.959i |
|
7.5e3 |
0+1.034e3i |
|
*1e4 |
0-465.116i |
|
1.25e4 |
0-96.072i |
|
1.5e4 |
0+40.928i |
|
1.75e4 |
0+154.371i |
|
2e4 |
0+291.333i |
|
2.25e4 |
0+509.856i |
|
2.5e4 |
0+1.002e3i |
|
2.75e4 |
0+3.729e3i |
|
3e4 |
0-3.013e3i |
|
3.25e4 |
0-1.175e3i |
|
3.5e4 |
0-759.460i |
|
3.75e4 |
0-573.530i |
|
4e4 |
0-466.861i |
|
4.25e4 |
0-397.054i |
|
4.5e4 |
0-347.461i |
|
4.75e4 |
0-310.195i |
|
5e4 |
0-281.029i |
Схемы и параметры первого ДП.
Интересное из раздела
Проектирование железнодорожного узла связи на основе цифровой АТС Квант-Е
Цифровая система коммутации «Квант-Е» имеет модульное построение,
распределенную коммутацию, децентрализованное программное управление и
возможность централ ...
Внедрение технологии спектрального уплотнения на участке ст. Свердловск – ст. Тюмень
В последние два десятилетия прошедшего и в начале текущего века
происходит смена эпохи индустриально-технологического развития передовых
государств эпохой и ...
Шагающий аппарат
Одной
из важных разновидностей роботов являются шагающие роботы, предназначенные для
перемещения по труднопроходимой местности. В отличие от к ...