Разделы сайта
- Главная
- Электроника: интересно и познавательно
- Организация производства радиоэлектронной техники
- Телефонные переговоры по технологии IP-телефонии
- Информационно-компьютерная система службы видеонаблюдения
- Физические основы электроники
- Автоматические системы управления
- Цифровые устройства и приемники
Моделирование элементов и систем управления
Управляемый объект состоит их четырех типовых динамических звеньев, соединенных между собой в определенной последовательности с образованием двух замкнутых контуров (рисунок 1).
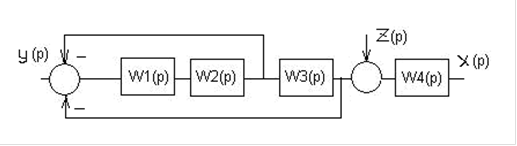
Рисунок 1 - Исходная алгоритмическая структура объекта
В данном объекте включены следующие динамические звенья:
1) ![]() - инерционное звено 2-го порядка;
- инерционное звено 2-го порядка;
)![]() - интегро-дифференцирующее звено с преобладанием интегрирования;
- интегро-дифференцирующее звено с преобладанием интегрирования;
) ![]() - инерционное звено 1-го порядка;
- инерционное звено 1-го порядка;
)![]() - Идеальное интегрирующее звено;
- Идеальное интегрирующее звено;
По заданию:
закон регулирования - ПИ;
канал воздействия - Z-X (Хз -X);
вид переходного процесса -20%-ное перерегулирование;
контур цифровой модель simulink
- Исследование устойчивости объекта
- Составление цифровой модели объекта
- Получение переходной характеристики объекта по каналу управления «у-х» методом цифрового моделирования
- Аналитическая проверка результатов моделирования объекта
- Идентификация объекта по переходной характеристике и ориентировочный расчет настроечных параметров регулятора
- Уточнение настроечных параметров регулятора и получение переходных характеристик по каналам «Хз-Х» и «Z-X»
Интересное из раздела
Проектирование автомата подачи звонков
Разработанный автомат подачи звонков удовлетворяет всем
требованиям, предъявленным в задании. Настройка автомата производится с помощью
трех кнопок: «вверх» ...
Метрологические характеристики уровнемеров
Многообразие применяемых типов измерительных
преобразователей, повышение требований к точности и надежности работы систем
приводят к необходимости использов ...
Проектирование автоматического измерителя артериального давления
Важным компонентом клинического мониторинга, определяющим
состояние сердечнососудистой системы и организма в целом, является контроль
кровяного давления. Дв ...